

robot control system
A control system and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of not being able to use other functions that can be started in parallel with automatic operation, and not being able to watch, so as to improve convenience and reduce the risk of stopping Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach 1
[0033] figure 1 It is a block diagram showing the robot control system according to the first embodiment of the present invention. The robot control system 1 includes a robot control device RC for controlling the motion of the robot R, a movable operation device TP for operating the robot R, and a charging device CU for charging the movable operation device TP.
[0034] First, the portable operation device TP will be described. The movable operating device TP is provided with: an emergency stop switch 4 for manually stopping the robot R in an emergency during automatic operation, a display 5 for displaying various data such as teaching data, inputting an inching feed signal and The keyboard 6 for teaching signals, the CPU 33 as a central processing unit, the RAM 34 as a temporary calculation area, the transceiver 32 for communicating with the robot control device RC, the secondary computer as the driving source of the movable operating device TP The battery 36, the power bu...
Embodiment approach 2
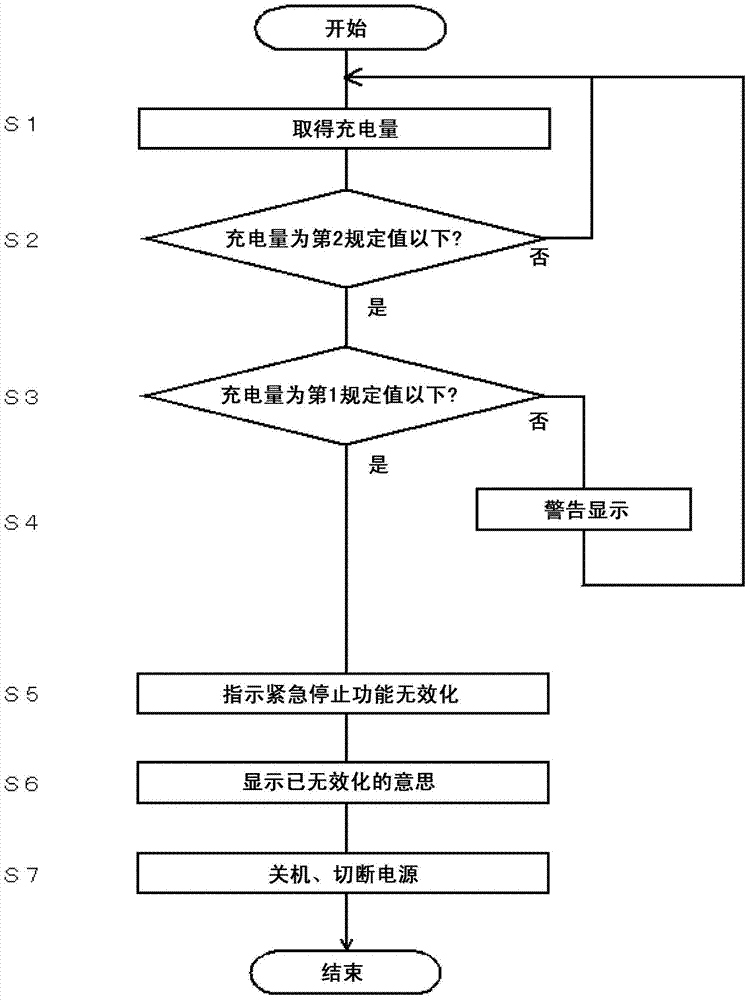
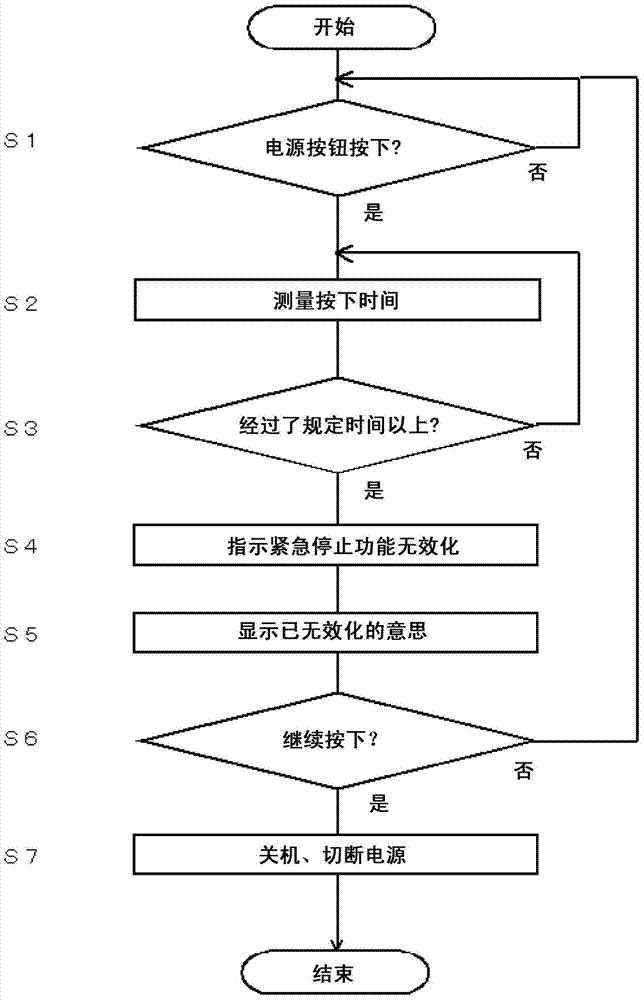
[0053] Next, Embodiment 2 of the present invention will be described. In Embodiment 1, the emergency stop function is automatically disabled in response to a decrease in the charge level, and shutdown processing and power supply cutoff processing are executed. In Embodiment 2, in addition to the above-mentioned processing according to the reduction of the charged amount, the above-mentioned processing is executed at the will of the operator regardless of the charged amount. More specifically, when the power button 7 is pressed for a long time while the power is supplied from the secondary battery 36, the emergency stop function is disabled sequentially according to the pressing time regardless of the charge amount of the secondary battery. and power cut off.
[0054] image 3 It is a flowchart showing the state of processing executed by the main control unit 35 of the portable operation device TP in the second embodiment.
[0055] In step S1 in the figure, it is checked whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More