Attitude estimation method based on iteration volume Kalman filter
A Kalman filter and attitude estimation technology, which is applied in the direction of navigation computing tools, etc., can solve the problems of affecting the filtering accuracy, filtering divergence, and decreasing filtering accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be described in detail below in conjunction with the accompanying drawings.
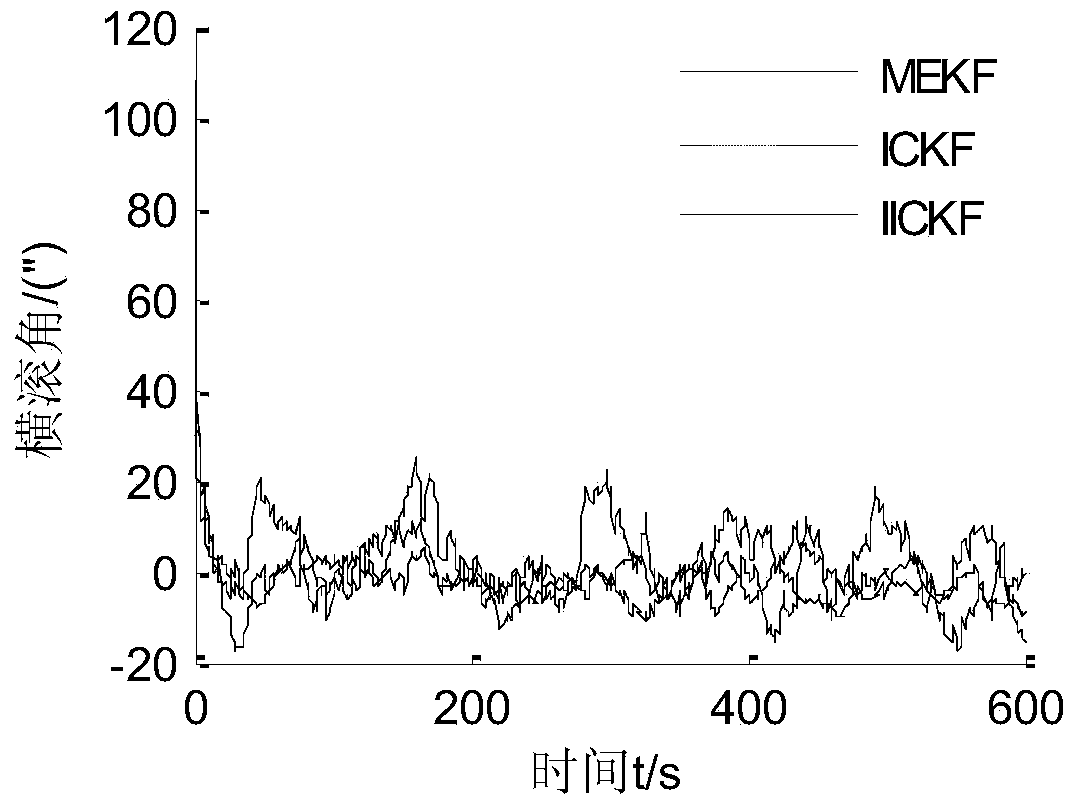
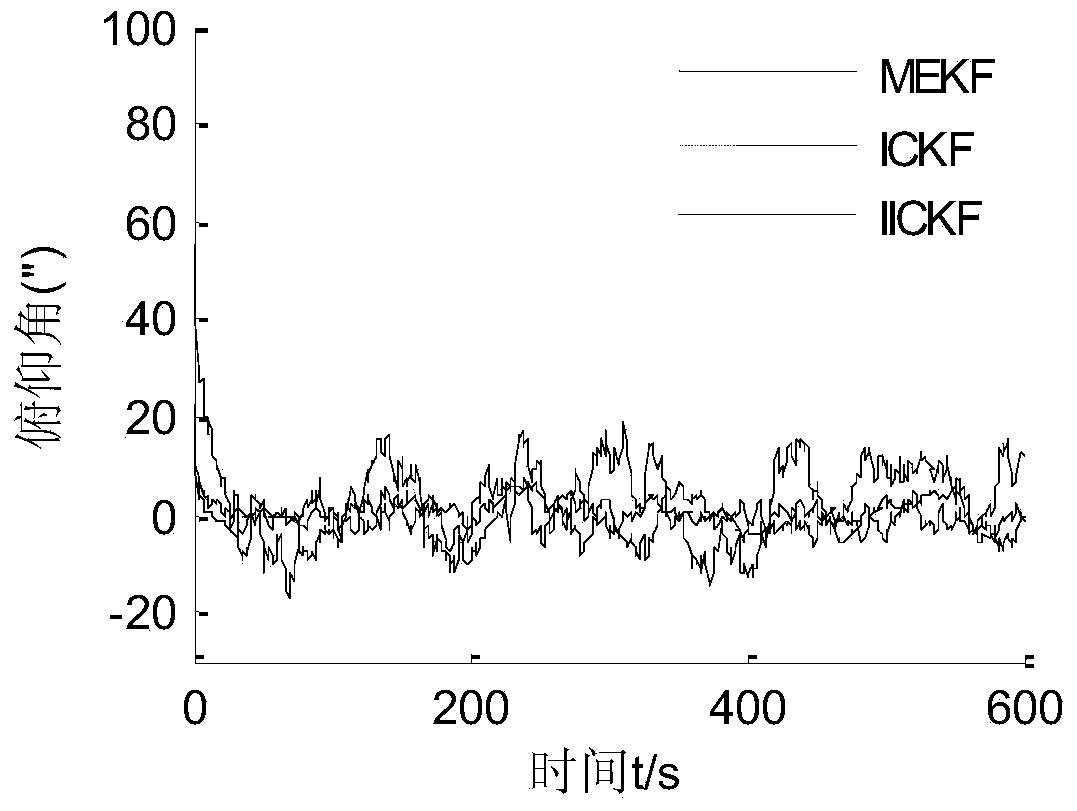
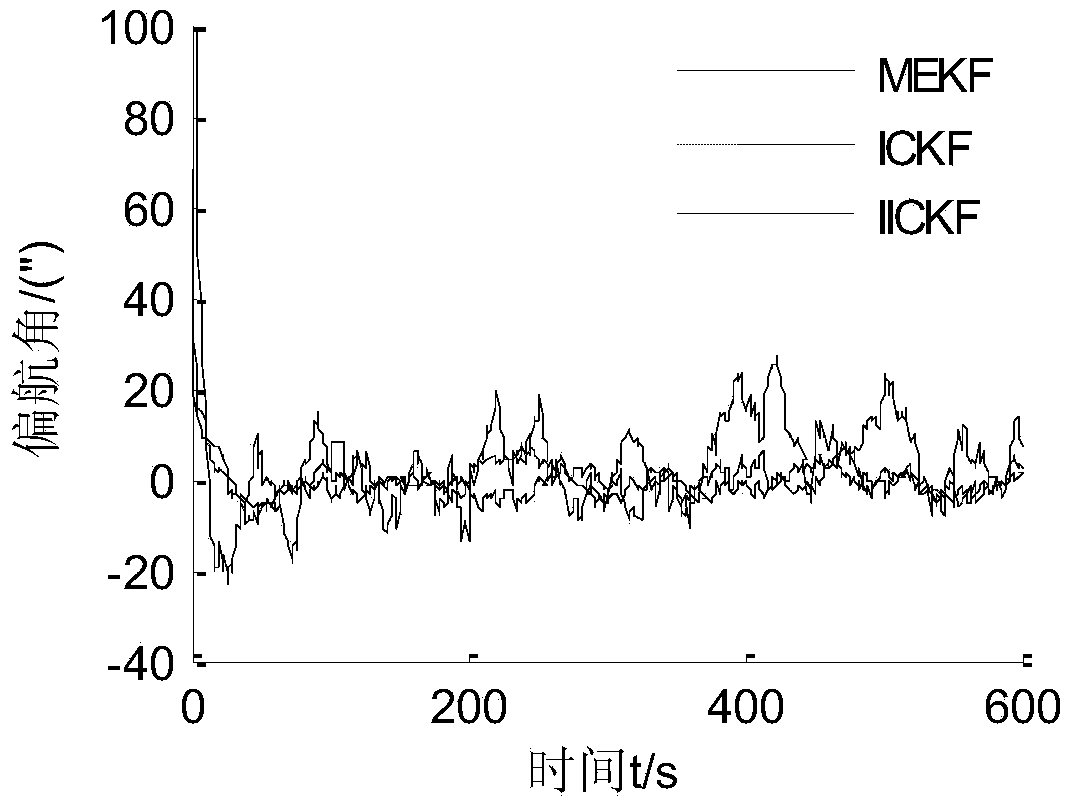
[0085] The aircraft attitude estimation method based on iterative volumetric Kalman filter proposed by the present invention is simulated by Matlab simulation software, and compared with the estimation performance of existing filtering algorithms, such as multiplicative extended Kalman filter (Multiplicative Extended Kalman Filter, MEKF) and iterative volumetric Kalman filtering (ICKF). The simulation hardware environment is Intel(R) Core(TM) i5-2410M CPU2.30GHz, 4G RAM, Windows7 operating system. Such as Figure 1 to Figure 3 As shown, the IICKF algorithm proposed by the present invention is equivalent to the convergence speed of the ICKF algorithm, but their estimation accuracy and convergence speed are always higher than the MEKF algorithm. This is because the IICKF algorithm and the ICKF algorithm of the present invention are based on the CKF algorithm. Its acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More