

Image perspective-based micro unmanned aerial vehicle indoor autonomous navigation method
An autonomous navigation and drone technology, applied in the field of drone navigation, can solve the problems of low positioning accuracy, poor real-time performance, and large amount of calculation, and achieve the effect of high positioning accuracy, low hardware requirements, and strong real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0066] 1. During the indoor flight of the micro UAV, the onboard front-view camera Camera1 acquires image a in real time, and the onboard down-view camera Camera2 acquires image b in real time.
[0067] Utilize the forward-looking optical camera and the downward-looking optical camera onboard the UAV to acquire image sequences in real time, but only need to save the current frame and the previous frame image.
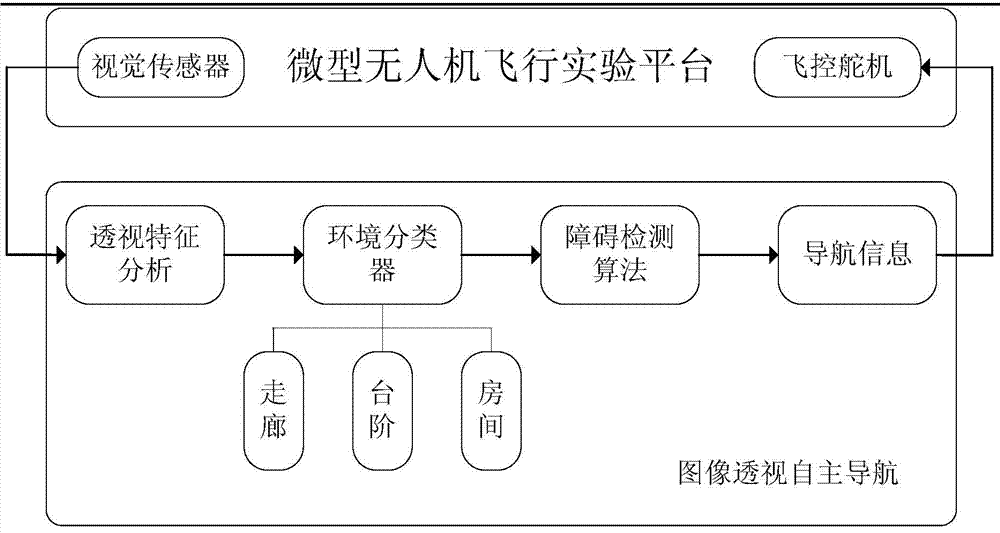
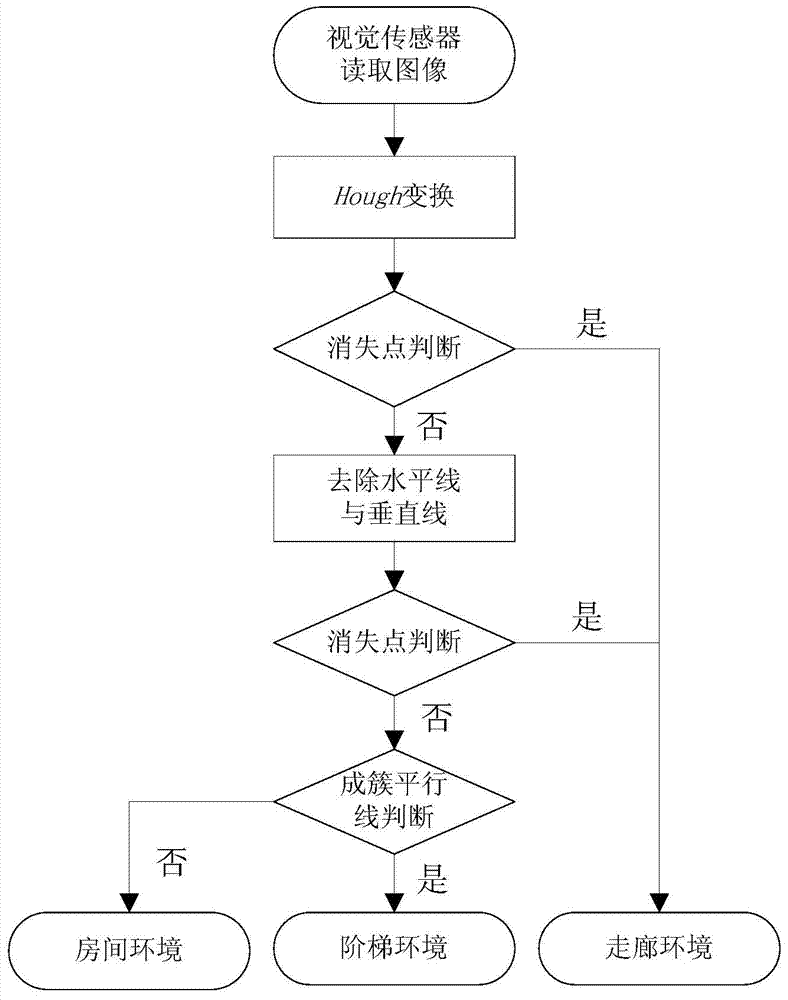
[0068] 2. Design an indoor environment classifier to judge the environment type of the micro drone by preprocessing the image a and image b.
[0069] The specific process is as figure 2 As shown, the Canny edge detection operator is first used to process the image a, and then the Hough transform is used to extract the straight line. Since the vanishing point is the intersection point of the oblique lines in the image, the detected horizontal and vertical lines need to be removed. In view of the error in the straight line extraction, the image The intersection points o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More