

Binocular vision positioning and three-dimensional mapping method for indoor mobile robot
A technology for binocular vision positioning and mobile robot, which is applied in instrumentation, 3D modeling, image data processing, etc. It can solve problems such as large amount of calculation, and achieve the effect of improving real-time performance, strong scalability and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
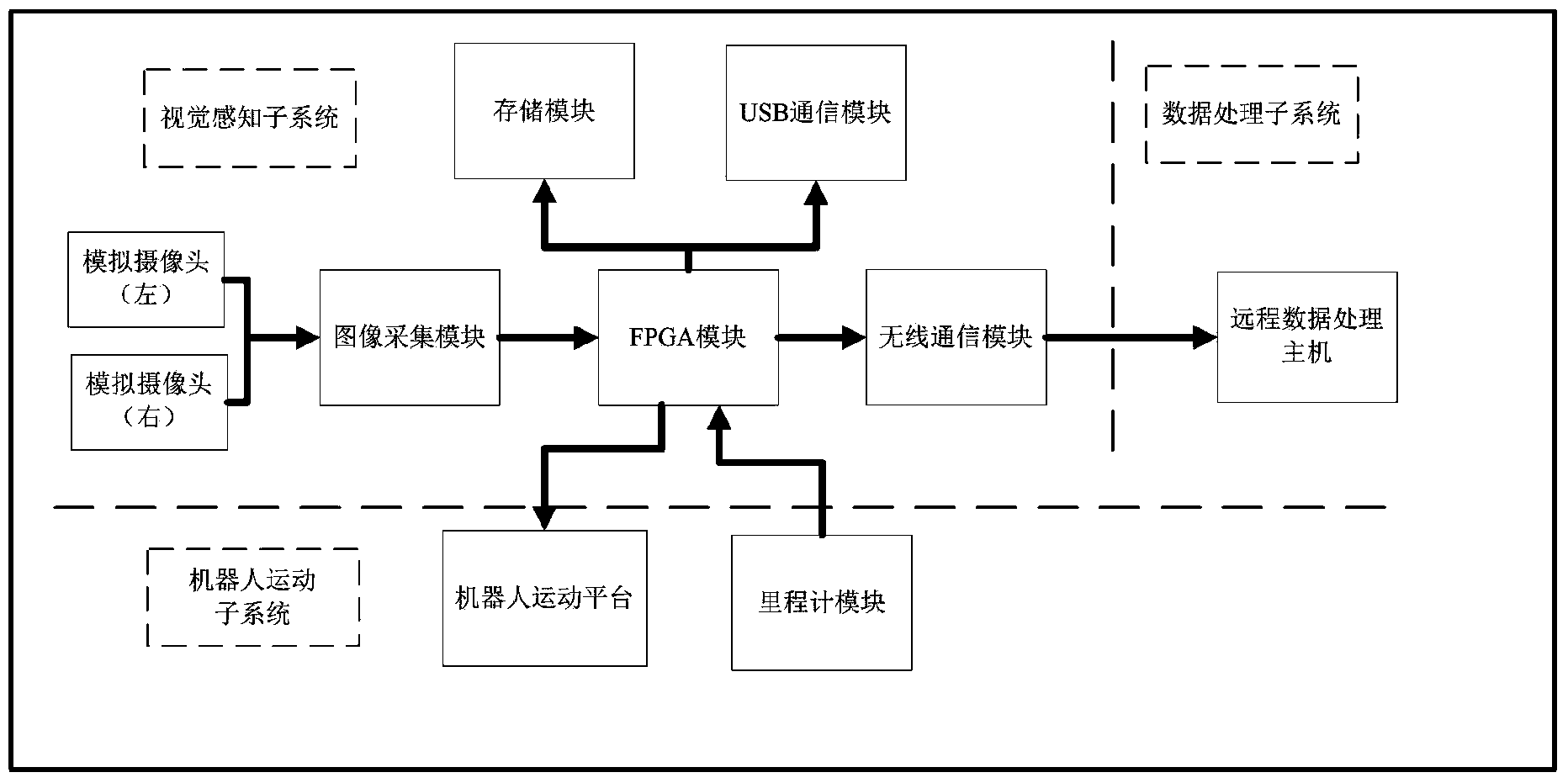
[0043] figure 1It is a system structural diagram of the binocular vision positioning and three-dimensional mapping method of the mobile robot according to the present invention, including the following modules: image acquisition module; FPGA module; storage module; USB communication module; wireless communication module; robot motion platform; odometer module ; Wherein the FPGA module is connected with the image acquisition module, the storage module, the USB communication module, the wireless communication module, the robot motion platform and the odometer module. Using the wireless communication module, the motion information of the mobile robot and the information of the left and right images are transmitted to the remote data processing host, that is, the data processing subsystem, and the information of the left and right images is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More