

Hydraulically-driven type bionic single-leg double-loop control method
A dual-loop control, driving technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as damage to the joint transmission/drive components of the foot mechanism, and adverse effects on the walking stability of the robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
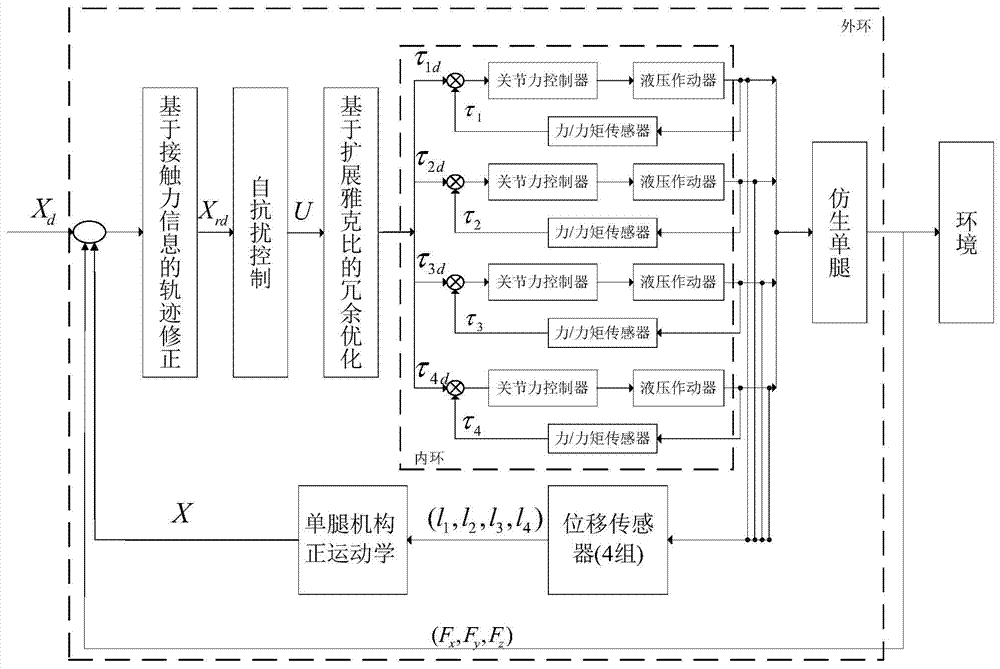
[0045] Such as figure 1 As shown, the implementation steps of the hydraulically driven bionic single-leg double-loop control method in this embodiment are as follows:
[0046] 1) Receive the original expected foot position trajectory X of external input d :(x d ,y d ,z d );
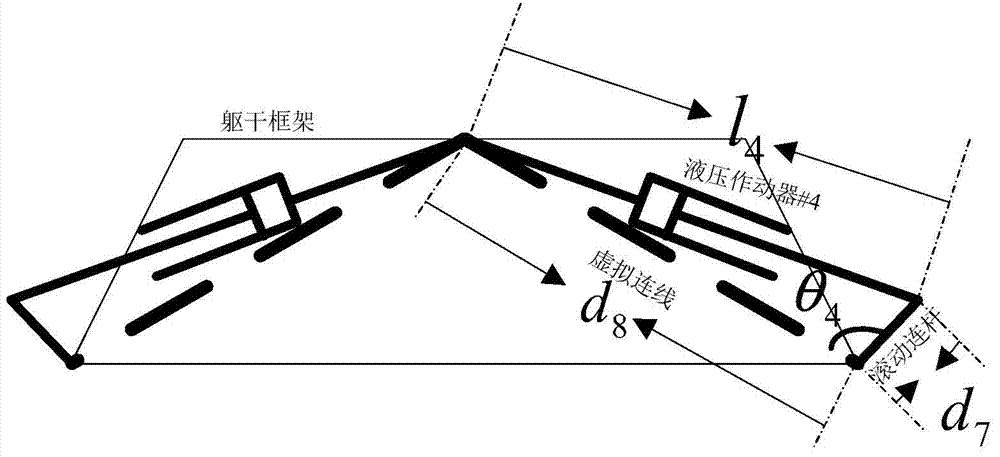
[0047] 2) Trajectory correction based on contact force information: collect the foot force information of the bionic single leg (F x , F y , F z ), when the foot force information (F x , F y , F z ) shows that when the foot is fully in contact with the ground, obtain the joint position information of each joint of the bionic single leg (l 1 , l 2 , l 3 , l 4 ), according to the joint position information (l 1 , l 2 , l 3 , l 4 ) to obtain the actual position of the foot end X: (x, y, z) by means of forward kinematics calculation. d :(x d ,y d ,z d ) for re-planning to obtain the desired foot-end position trajectory X after re-planning rd :(x rd ,y rd ,z rd );
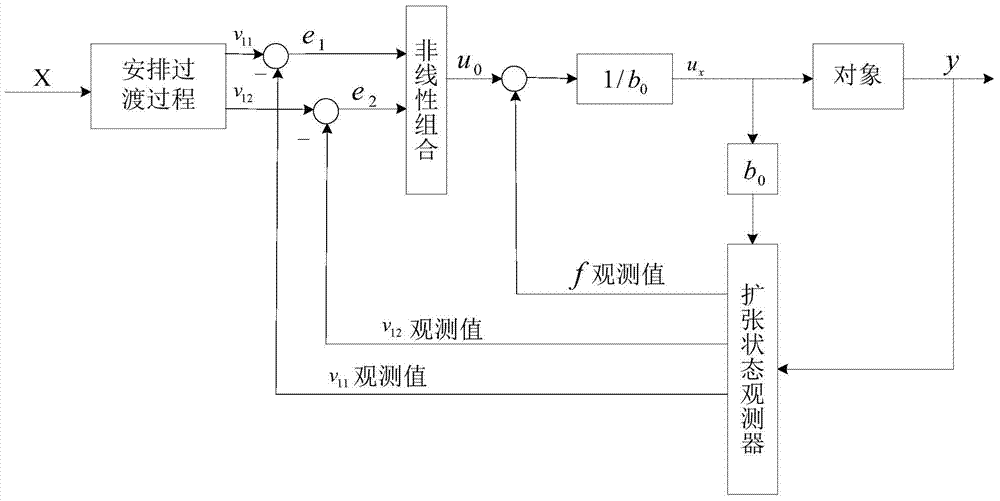
[0048] 3) Active d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More