

Electromagnetic drive positioning control method and application of the same
A positioning control and electromagnetic technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of precise drive control of difficult-to-drive systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0069] In the following, GMA (giant magnetostrictive actuators, giant magnetostrictive actuators) as the controlled system will be described in detail.
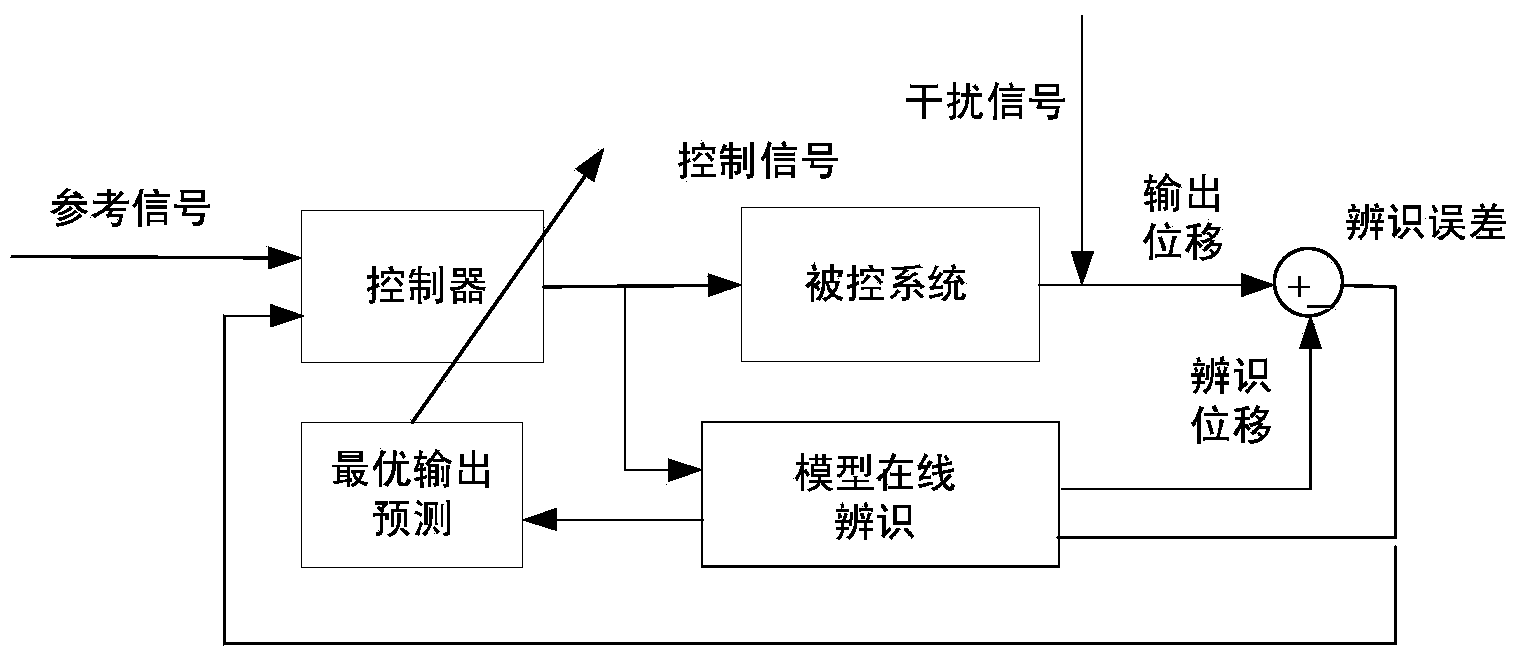
[0070] Such as figure 1 As shown, the present embodiment provides an electromagnetically actuated positioning control method for realizing precise driving and high-precision vibration control of giant magnetostrictive actuators (giant magnetostrictive actuators, GMA). Accurate identification and description, and linear compensation control can be performed on it to ensure the effectiveness of precise driving and vibration control.
[0071] Such as figure 1 As shown, the electromagnetic actuation drive positioning control method provided in this embodiment includes an adaptive feedback control process, specifically including the following steps:
[0072] Step 1.1, model online identification: establish the controlled autoregressive moving average model (CARMA) of the controlled system, and realize the The model is built and...
Embodiment 2
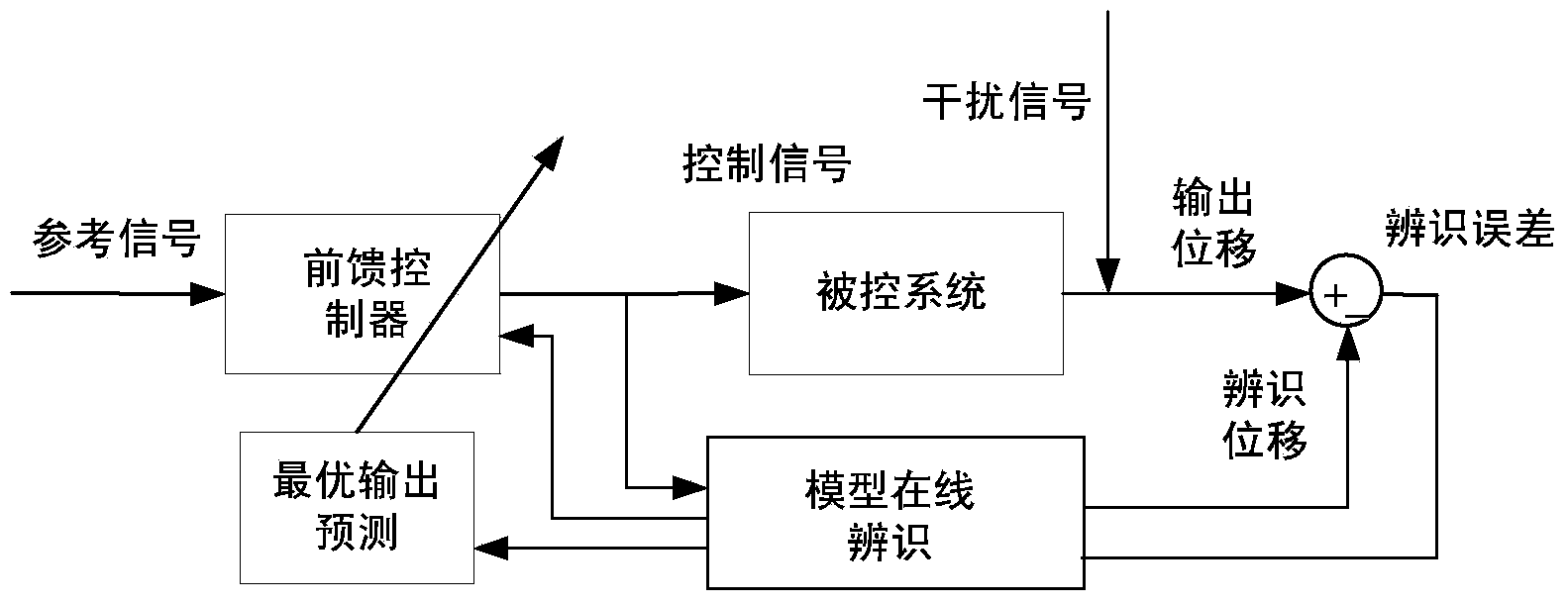
[0100] Such as figure 2 As shown, the electromagnetic actuation drive positioning control method provided in this embodiment includes an adaptive feedforward control process, which specifically includes the following steps:
[0101] Step 2.1, establishing a feedforward control model of the controlled system;
[0102] In step 2.2, the control current of the controlled system is assigned to the feed-forward control model, and the actual output displacement of the controlled system is obtained to realize a cyclic open-loop control.
[0103] In this embodiment, the feedforward control model is established in the following way:
[0104] -Establish the controlled autoregressive sliding average model of the controlled system, and realize the online construction and identification of the model for the controlled system through the combination of the controlled autoregressive sliding average model and the recursive augmented least square method, forming an identification feedforward ...
Embodiment 3
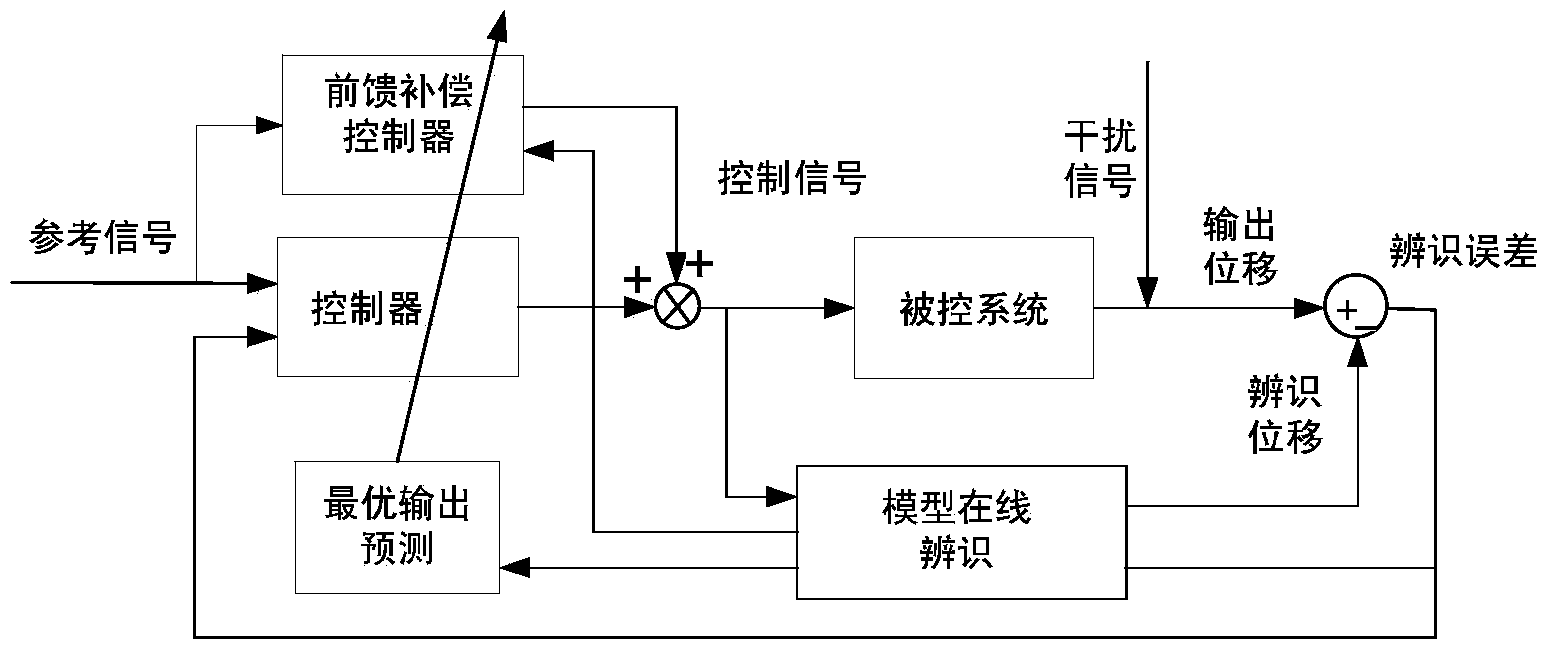
[0108] Example 3 is a combination of Examples 1 and 2.
[0109] Such as image 3 As shown, the electromagnetic actuation drive positioning control method provided in this embodiment includes the adaptive feedback control process provided in Embodiment 1 and the adaptive feedforward control process provided in Embodiment 2. The combination of the two processes realizes the precise positioning control of GMA .
[0110] From image 3 It can be seen from the figure that this embodiment combines the two algorithms of the feedback control process and the feedforward control process, which not only retains the high control accuracy and efficiency of the feedback control process of Embodiment 1, but also has the good timeliness of the feedforward control process of Embodiment 2 , while introducing a feed-forward link to effectively compensate the closed-loop control of the system. This embodiment has good application value for high-precision and real-time drive systems and vibratio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More