A multi-joint robot
A multi-joint robot, reducer technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low efficiency, high labor intensity, poor safety, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0026] In this embodiment, the multi-joint robot includes a large arm and a small arm that are horizontally arranged and articulated with each other, a motion unit disposed on the small arm, and a mechanical claw for grabbing parts. The motion unit includes a lifting mechanism, The mechanical claw is arranged on the lifting mechanism so that it can move up and down along with the lifting mechanism.
[0027] Preferably, the moving unit further includes a rotating mechanism, the lifting mechanism can drive the rotating mechanism to move up and down, and the mechanical claw is arranged on the rotating mechanism.
[0028] Preferably, the rotating mechanism includes a rotating shaft, a first synchronous belt mechanism and a first driving mechanism for driving the first synchronous belt mechanism, the rotating shaft is vertically arranged on the small arm, and the first synchronous belt mechanism includes the first synchronous belt mechanism A synchronous pulley, a second synchronou...
Embodiment 2
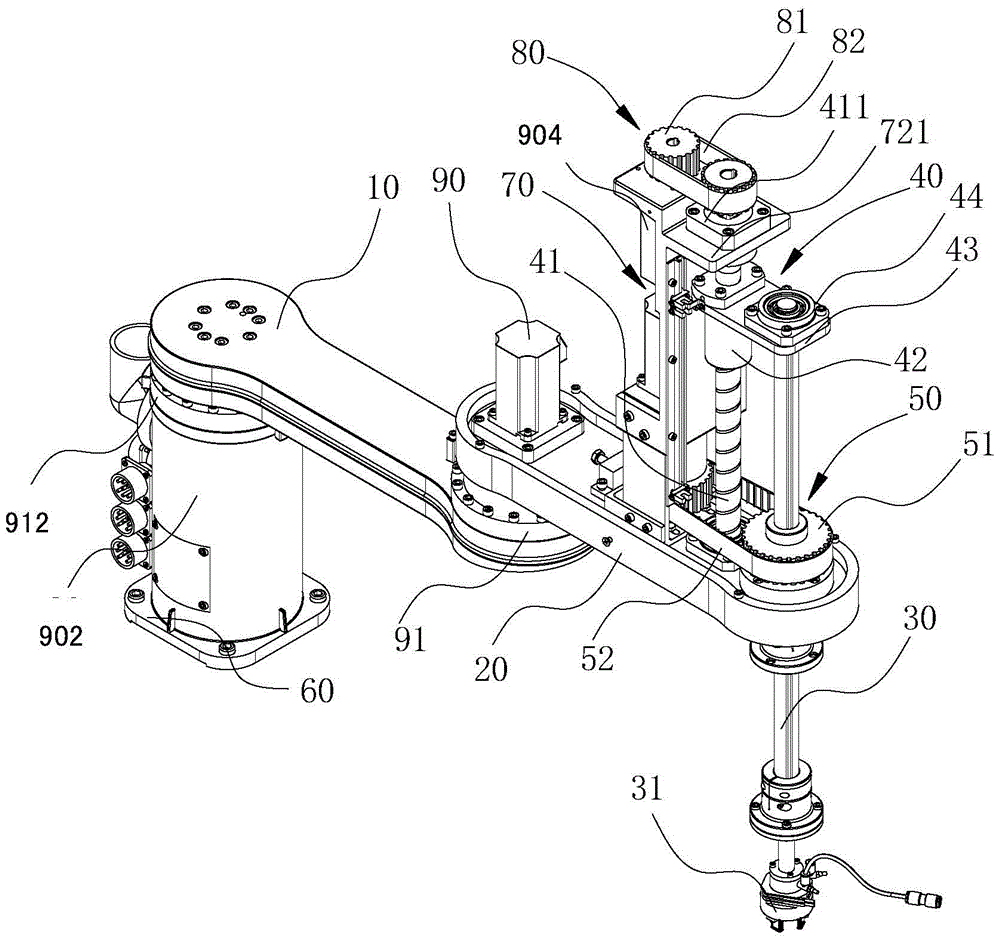
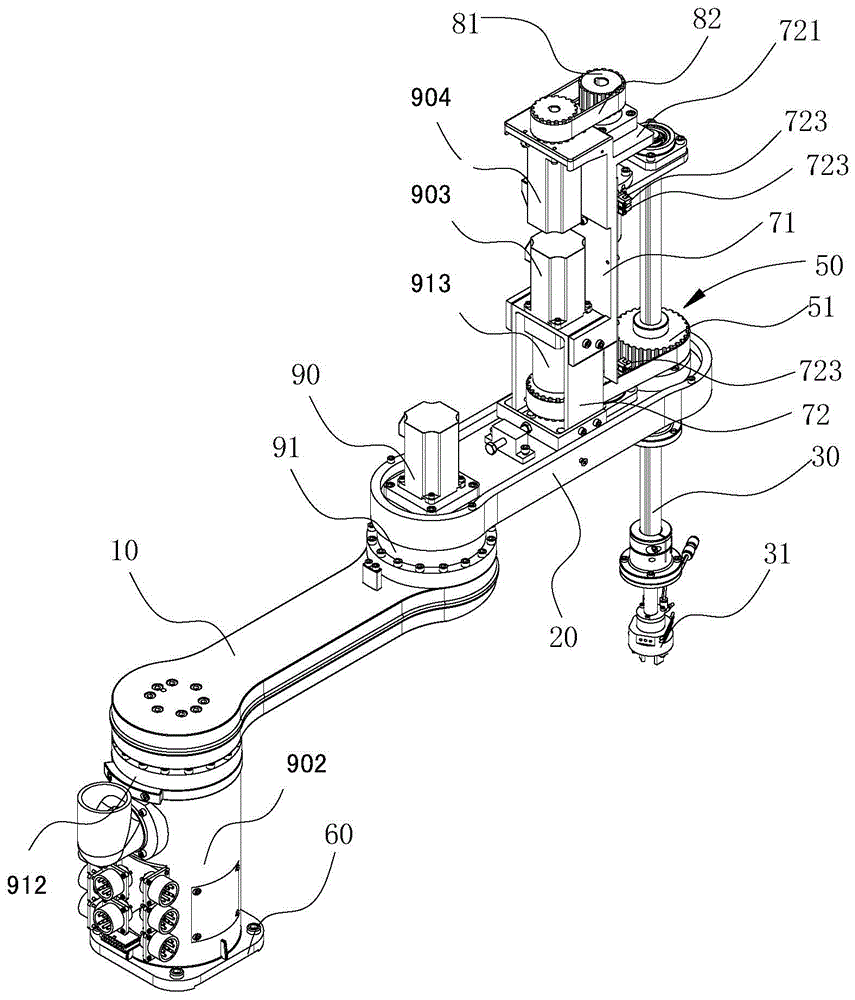
[0039] Such as figure 1 , 2As shown, this embodiment provides a multi-joint robot, which includes a horizontally arranged and mutually articulated boom 10 and a forearm 20, a motion unit arranged on the forearm, and a mechanical claw 31 for grabbing parts, The moving unit includes a lifting mechanism 40 , on which the mechanical gripper 31 is arranged, and can move up and down along with the lifting mechanism 40 .
[0040] In this embodiment, one end of the boom 10 is hinged to one end of the small arm 20 . The mechanical claw 31 can specifically adopt an air claw. The air gripper is connected with the pneumatic mechanism, and the air gripper can grasp the workpiece or loosen the workpiece according to the control of the pneumatic mechanism.
[0041] Preferably, if long-distance transmission is to be realized, the length of the large arm and / or the forearm can be increased, or the number of the forearm can be increased, that is, the number of the forearm can be multiple, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com