

Mechanical failure debugging device for rotor craft
A technology for rotorcraft and mechanical failure, applied in electrical testing/monitoring and other directions, can solve the problems of not considering the mechanical installation accuracy of the rotorcraft, wiring errors, errors, etc., and achieves good debugging effect, convenient operation, and improved control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
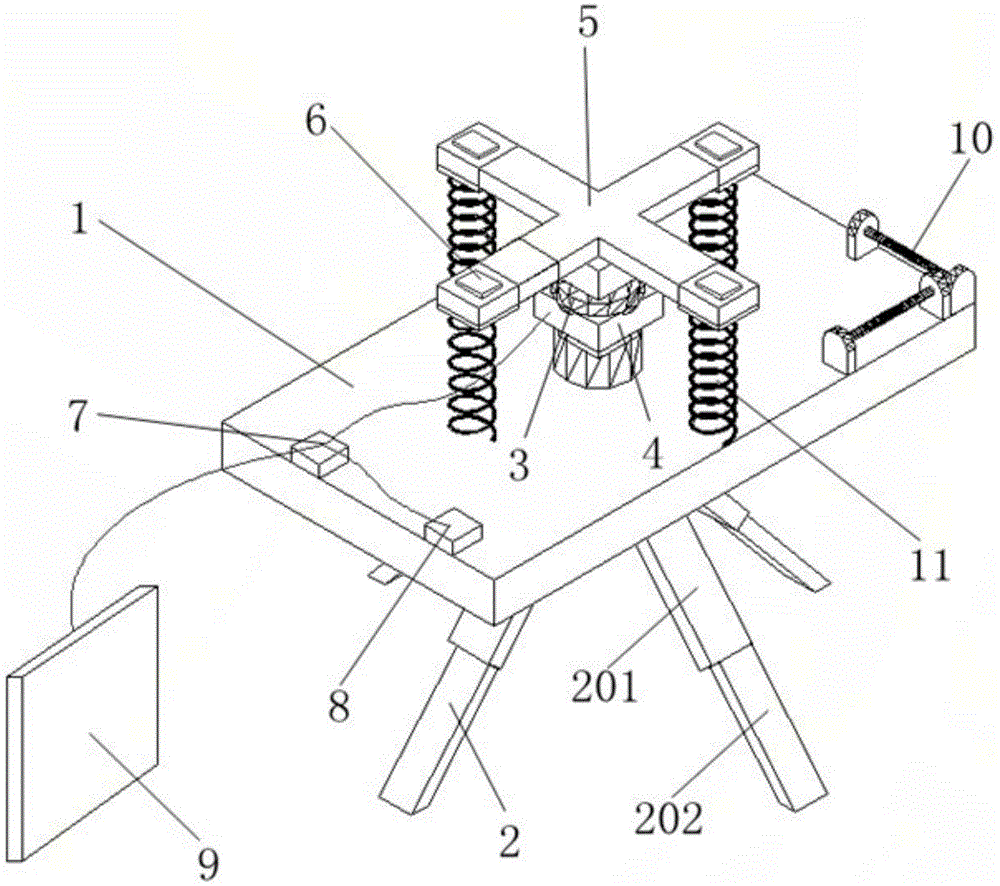
[0017] Such as figure 1 As shown, the mechanical failure debugging device for rotorcraft includes a base 1, the base 1 is supported by a telescopic tripod 2, and a spherical universal joint 3 is installed on the upper surface of the base 1, and the The spherical universal joint 3 is connected with an encoder 4 for obtaining the three-dimensional attitude data of the spherical universal joint 3, and the spherical universal joint 3 is equipped with a force arm fixing frame 5, and the force arm quantity of the force arm fixing frame 5 is the same as The rotor support quantity of rotorcraft is corresponding, and pressure sensor 6 is all installed on described each arm of force, when rotorcraft is installed on the arm fixed frame 5, described pressure sensor 6 is positioned at the arm of force and the rotor support of rotorcraft The room is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More