

Multiple-laser radar raster map merging system based on pilotless automobile
An unmanned vehicle and lidar technology, applied in the field of multi-lidar grid map fusion system, can solve the problems of high cost, practical limitations, complex structure, etc., to simplify the structure, improve the safety, and achieve a wide range of applications. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
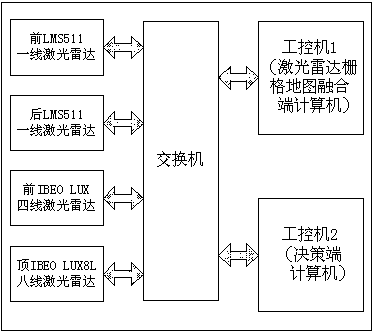
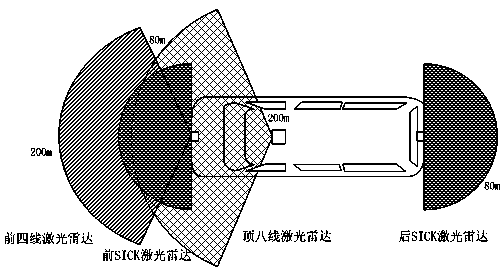
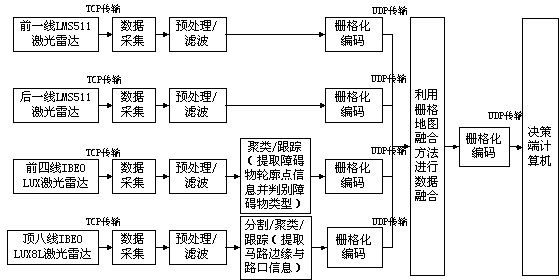
[0038] A multi-laser grid map fusion system based on driverless cars, including laser radars, switches and industrial computers; the laser radars include one-line laser radars and four-line laser radars installed in front of driverless cars, and The eight-line laser radar on the roof, and the one-line laser radar installed behind the car; the industrial computer includes a first industrial computer and a second industrial computer; the laser radar communicates with the first industrial computer through a switch and utilizes Ethernet Connect, the laser radar data is transmitted to the first industrial computer through the switch using Ethernet, and the first industrial computer analyzes and preprocesses the data, and then performs data processing for different laser radars, and performs rasterization on the effective data after processing. Grid code and transmit the coded value to the first industrial computer responsible for data fusion through Ethernet, then use the raster map...
Embodiment 2
[0040] A multi-lidar grid map fusion system based on unmanned vehicles is similar to Embodiment 1, the difference is that the first-line laser radar is 1 if there is an obstacle, and 0 if there is no obstacle; during the transmission process, Only transmit the coordinates of the grid image of 1; convert the data coordinates of each laser radar into the coordinates of the front-line laser radar; then, use the grid map fusion method to perform data fusion on the grid coded laser radar data .
Embodiment 3
[0042] A multi-lidar grid map fusion system based on unmanned vehicles is similar to Embodiment 2, the difference is that the grid map fusion method, as a fusion strategy, stipulates the priority of eight-line laser radar data The priority is the highest, followed by the four lines, and the priority of the first line is the lowest, and its coded values are fused.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More