

GNSS (Global Navigation Satellite System) ground operation path dynamic planning and navigation method based on forklift load monitoring
A technology of dynamic planning and navigation methods, applied in the direction of navigation calculation tools, etc., can solve the problems of inconvenient operations on flat ground, inability to reflect the real-time and flexibility of navigation, and reduce work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
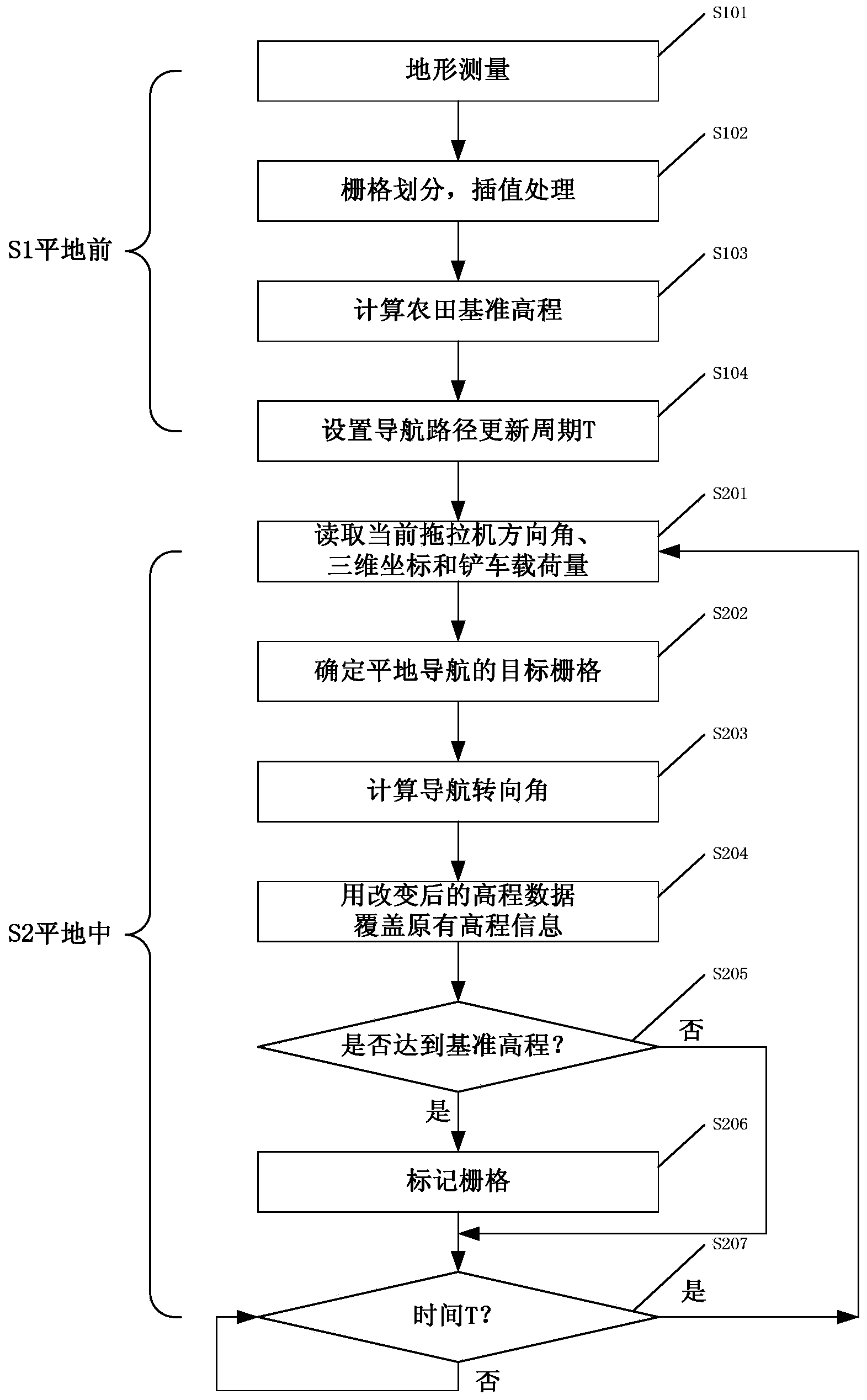
[0066] figure 1 It is a flow chart of the GNSS level ground operation path dynamic planning and navigation method based on forklift load monitoring of the present invention; the method includes the following steps:
[0067] S1. Before level ground,
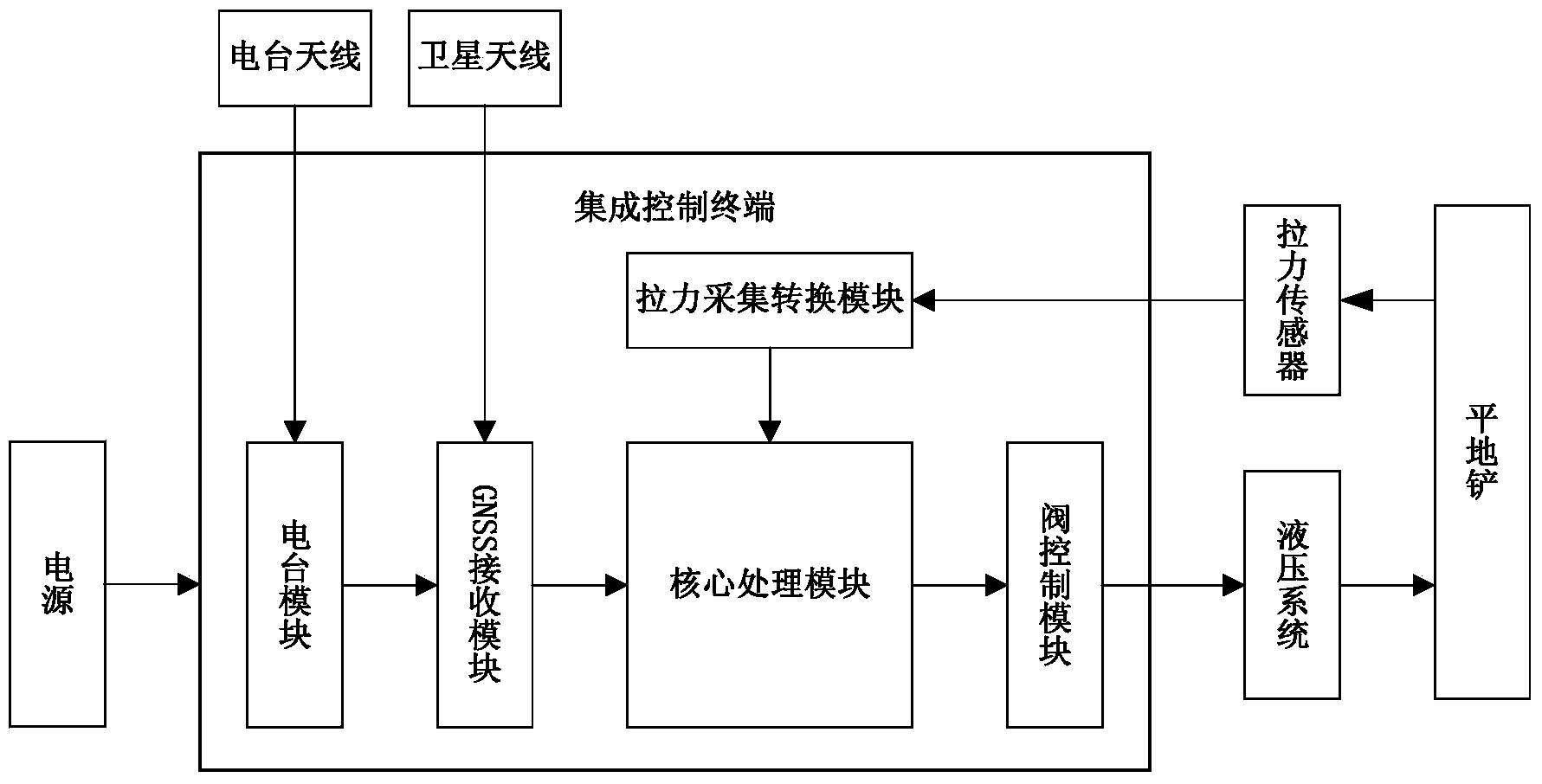
[0068] S101, terrain data collection; loading such as figure 2 The forklift of the shown GNSS intelligent control leveling system calibrates the three-dimensional coordinates of the origin, performs boundary measurement and internal measurement, and saves the farmland terrain data in the form of relative coordinates, that is, the elevation value, relative to the three-dimensional coordinates of the origin;
[0069] S102. Carry out grid division on the farmlan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More