

Triangular sailboard support frame identification method applicable to space non-cooperative target
A non-cooperative target and identification method technology, which is applied in the field of automatic identification of non-cooperative satellite triangular sailboard brackets, can solve the problems of low autonomy and system instability, and achieve less time-consuming, high positioning accuracy, and anti-corrosion Noise-capable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, and do not limit it in any way.
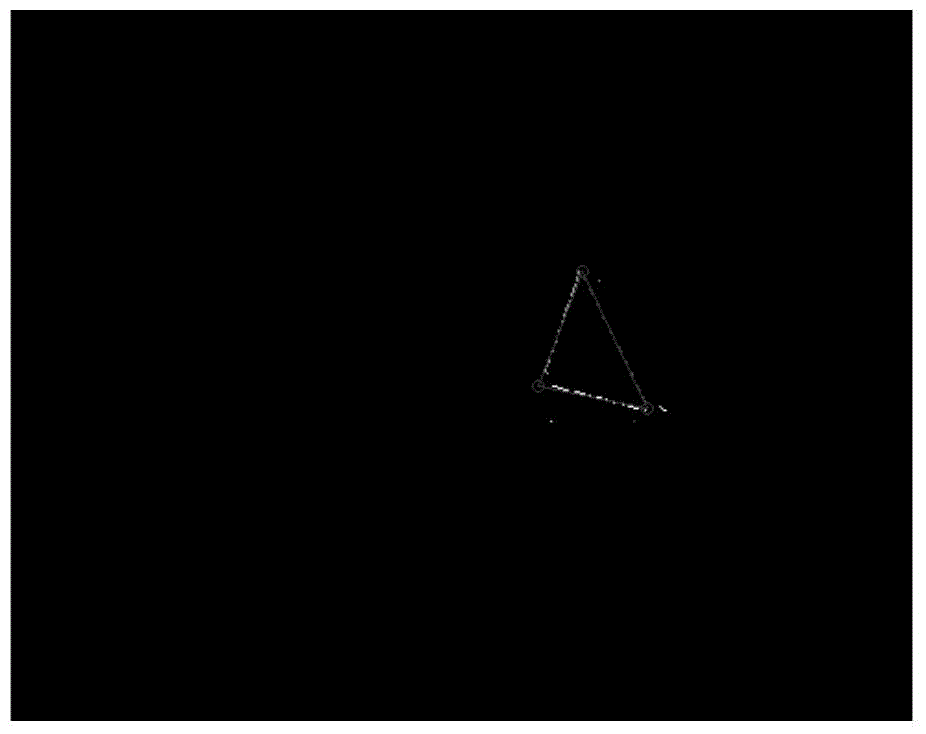
[0037] Such as figure 1 As shown, the triangular area automatic recognition method provided by the embodiment of the present invention includes:
[0038] (1) Image collection: use the camera to collect the target image;
[0039] (2) Image filtering: Perform median filtering and Wiener filtering on the collected images to eliminate noise interference and obtain a smooth target image;
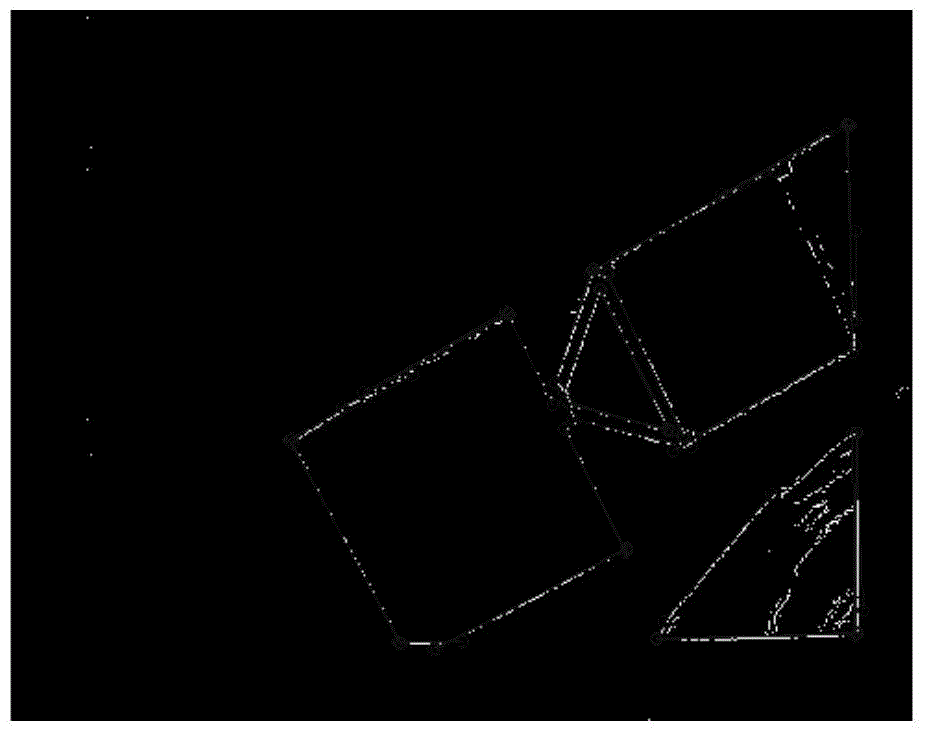
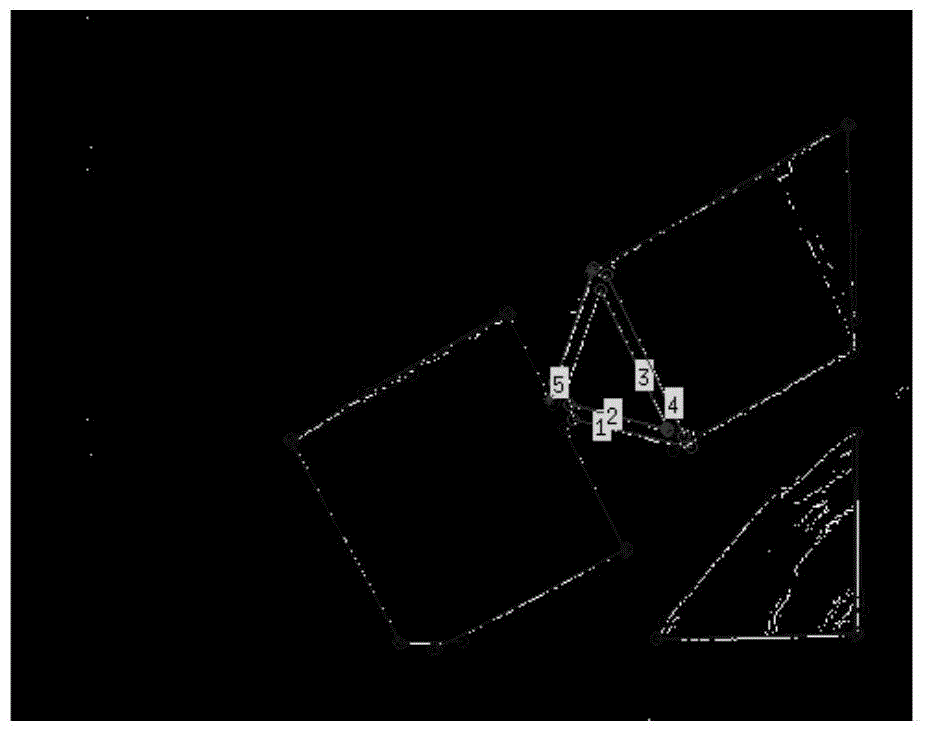
[0040] (3) Edge detection: edge detection is performed on the two images respectively to obtain edge feature information;
[0041] (4) Straight line extraction: adopt directional Hough transform to carry out straight line extraction to the image after edge detection, obtain each straight line information including each straight ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More