

Construction method of fuzzy neural network generalized inverse controller of chassis nonlinear system
A fuzzy neural network and non-linear system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of influence and mutual interference of control effects, and achieve easy implementation, improved driving safety, and low cost. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0023] The concrete implementation of the present invention divides following 7 steps:
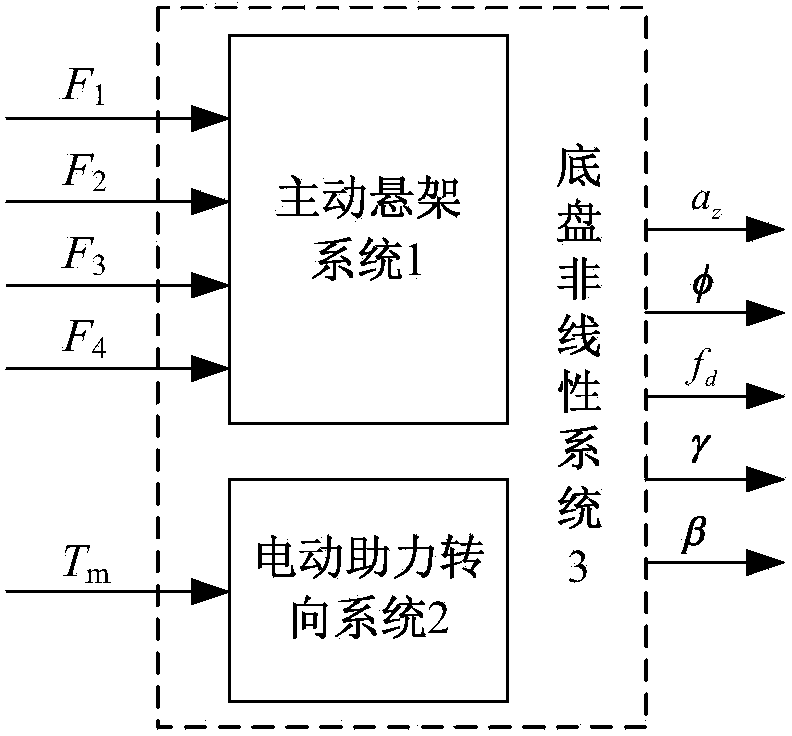
[0024] 1. Constitute the chassis nonlinear system3. Such as figure 1 As shown, the active suspension system 1 and the electric power steering system 2 are integrated to form a chassis nonlinear system 3, and the chassis nonlinear system 3 is used as a composite controlled object, then the input signal of the chassis nonlinear system 3 is: Active suspension force F 1 , F 2 , F 3 , F 4 and electric power assist torque T m , the output signal is: vertical acceleration a z , roll angle φ, suspension turbulence f d , yaw rate γ and center-of-mass bias angle β.
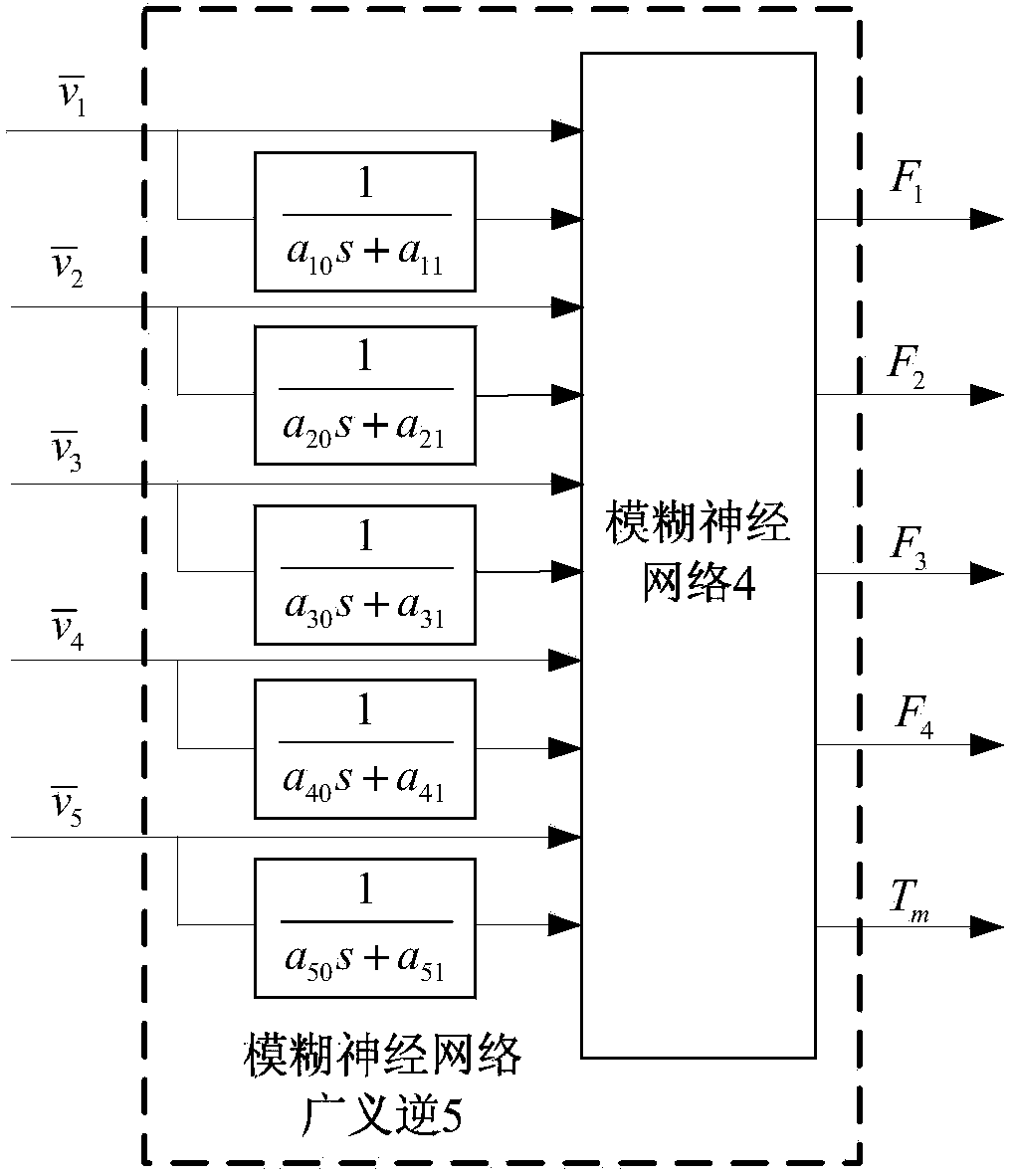
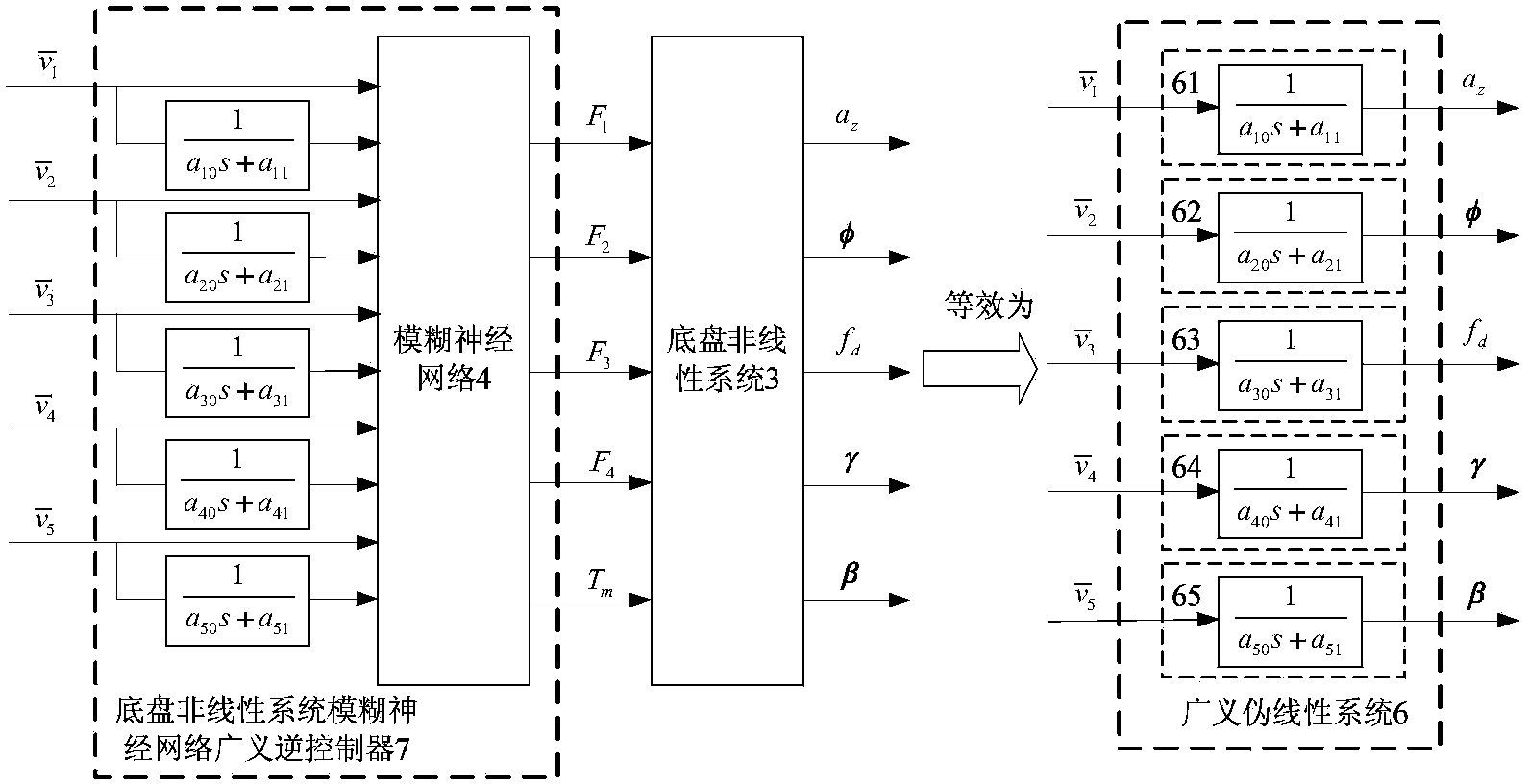
[0025] 2. If figure 2 As shown, through analysis, equivalence and derivation, it provides methodological basis for the construction and learning training of generalized inverse 5 of fuzzy n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More