

Space rendezvous system gain scheduling control method with linearization errors taken into consideration
A technology of gain scheduling control and space rendezvous, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve the time-consuming problems of spacecraft orbit rendezvous missions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0067] Specific embodiment one: the gain scheduling control method of the space rendezvous system considering the linearization error, it comprises the following steps:
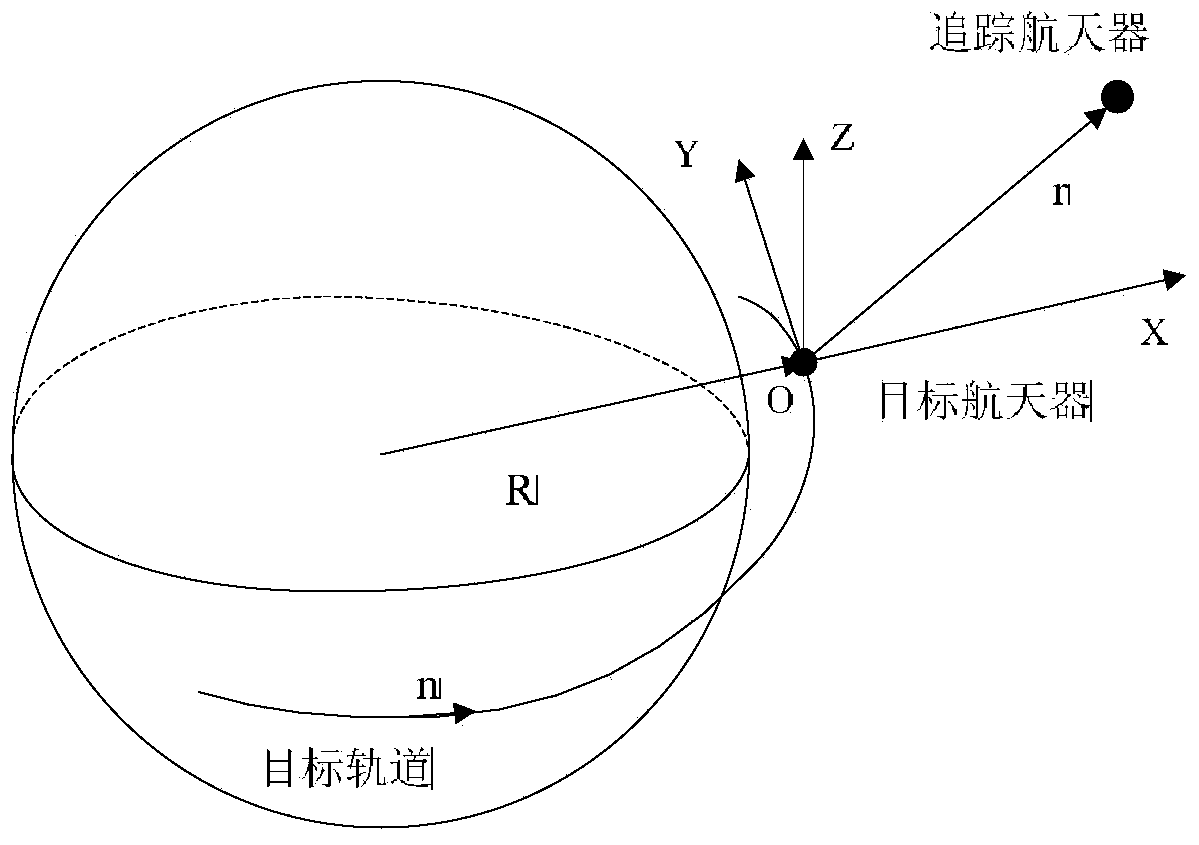
[0068] Step 1: When the two spacecraft are performing the rendezvous mission, one spacecraft passively flies in orbit, which is called the target spacecraft; the other spacecraft maneuvers under the action of the control force, and flies to the target spacecraft with different rules. It is called tracking spacecraft; assume that the target spacecraft is running on a circular orbit with a radius of R; for the convenience of description, the orbital coordinate system O-XYZ of the target spacecraft is introduced, its origin O is located at the center of mass of the target spacecraft, and the X axis is along the circular orbit The direction of the radius R, the Y axis is along the direction of tracking the flight of the spacecraft, and the Z axis points out of the orbital plane to form a right-handed coordinate sy...
specific Embodiment approach 2
[0124] Specific embodiment 2: γ corresponding to "the initial relative motion state vector is X(0)" in step 3 described in this embodiment 0 The solution process is:
[0125] For the initial relative motion state vector X(0), γ 0 is the only solution to the nonlinear equation (17):
[0126] ρ ( γ 0 ) X 0 T P ( γ 0 ) X 0 = 1 - - - ( 17 )
[0127] Since P(γ) is monotonic with respect to γ, the nonlinear equation (17) can be solved by dichotomy.
[0128] Other steps are the same as in the first embodiment.
specific Embodiment approach 3
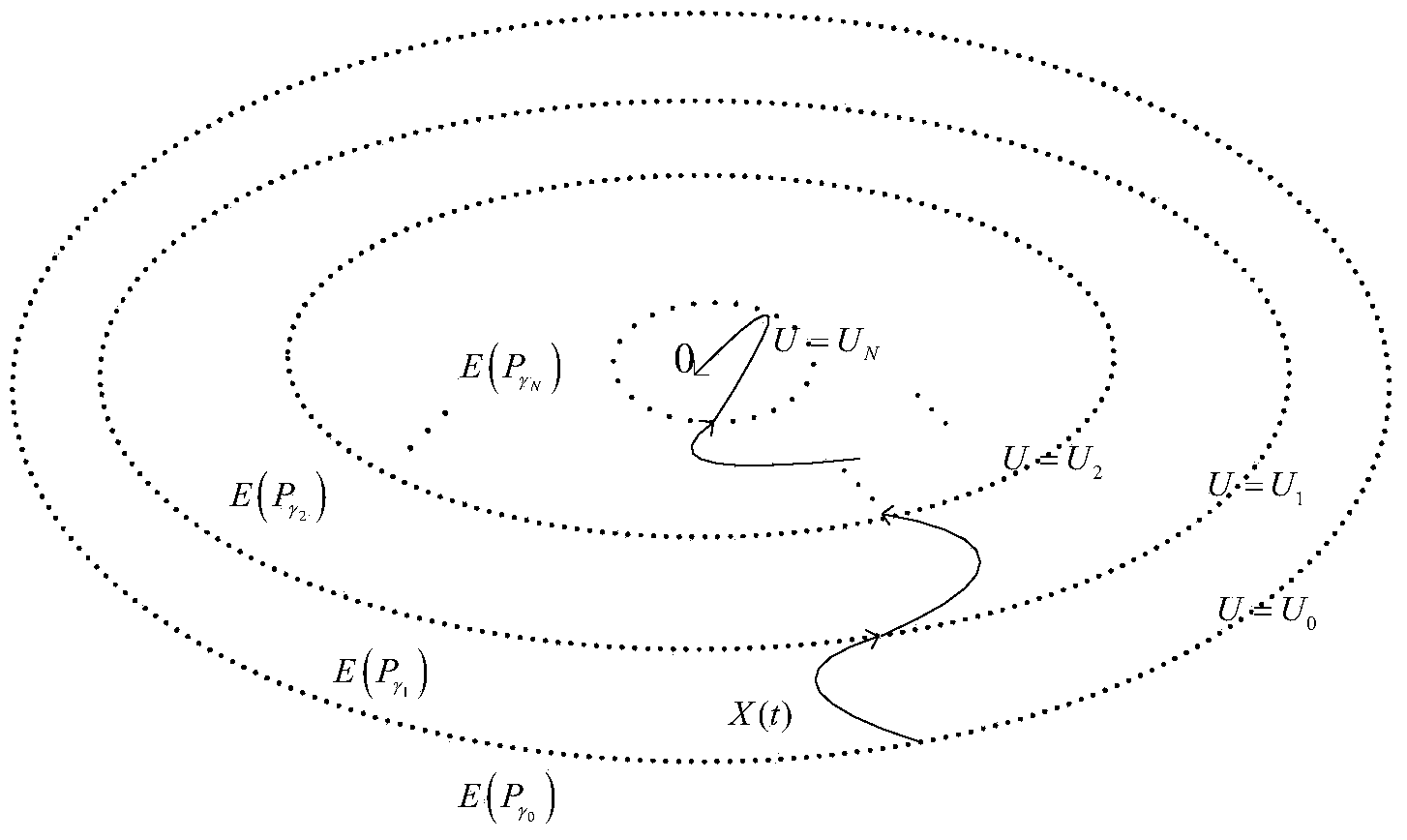
[0129] Specific embodiment three: in the step 3 described in this embodiment mode " gain scheduling controller (15) begins to work in spacecraft orbit rendezvous system, controller (15) according to U 0 → U 1 →…→U N-1 → U N The order of is applied to formula (6)" and the realization process is as follows:
[0130] Set a current variable r, its initial value is r=0 and the corresponding controller is U=U 0 , if r≤N-1, for the relative motion state vector X(t) at each moment, calculate
[0131]
[0132] if Then the gain scheduling controller U=U r+1 And let r=r+1; otherwise gain-scheduled controller U=U r , the relative motion state vector X enters the inner ellipsoid sequentially from the outermost ellipsoid; when the gain scheduling controller switches to U=U N When , the relative motion state vector X enters the innermost ellipsoid, and finally converges to the equilibrium point, and the controller does not switch anymore, that is, there is no need to calculate for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More