

Task space based self-collision avoidance control method for real-time movements of robot
A technology of task space and avoidance control, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of large calculation time and unsuitable real-time motion planning, and achieve the effect of promoting field application and avoiding self-collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
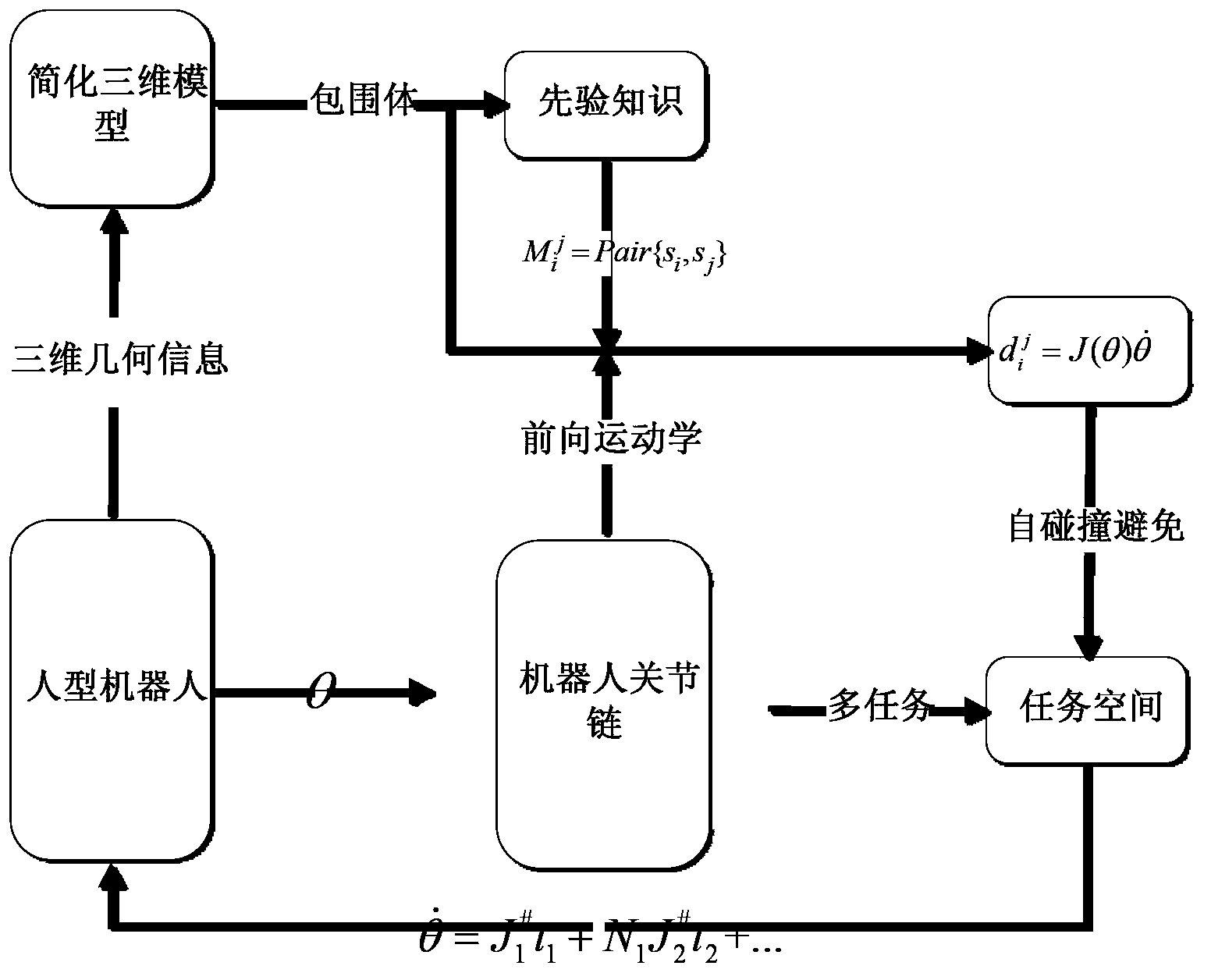
[0021] A real-time motion self-collision avoidance control method for a robot based on task space, the method includes tracking the end trajectory of the robot, and the specific steps are as follows figure 1 Shown:
[0022] 1) According to the three-dimensional geometric information of the robot, use the bounding volume to model, divide the body of the robot into different area blocks, and perform self-collision detection on the area pairs formed by every two area blocks,
[0023] Among them, self-collision detection includes the following steps:
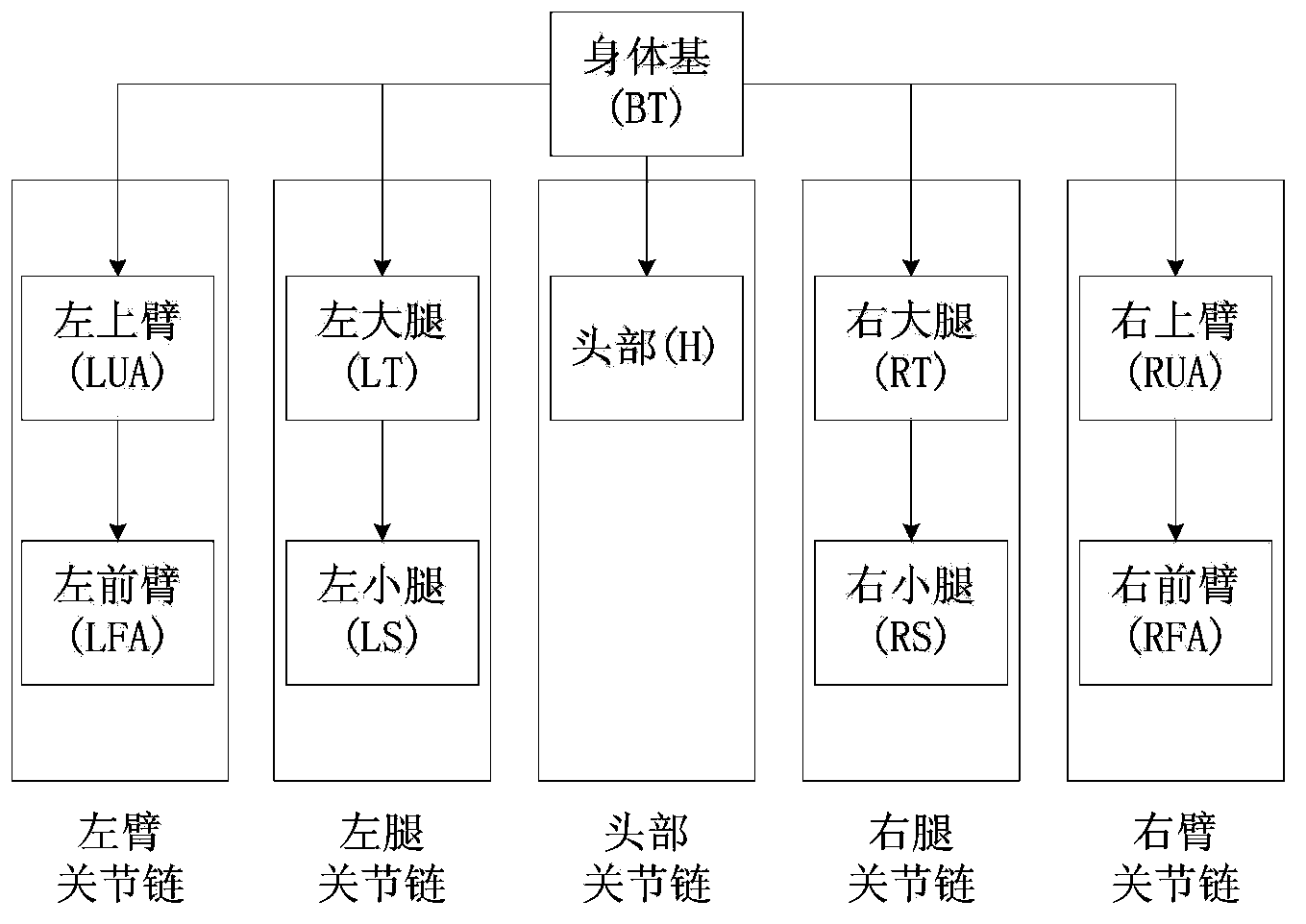
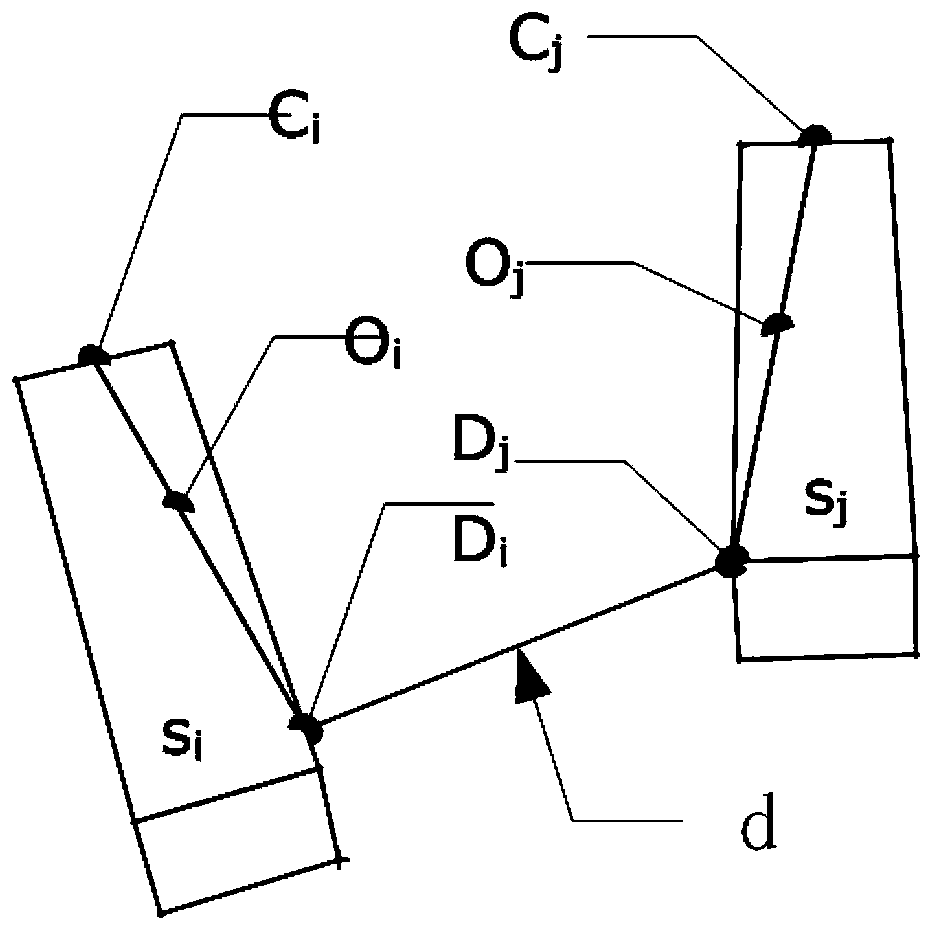
[0024] 11) According to the three-dimensional geometric information of the robot, use the bounding volume to model, and divide the robot's body into N regional blocks Such as figure 2 shown. Then define any two region blocks from the N region blocks as a region pair In this way, detecting whether the robot has self-collision can be defined as detecting whether the distance between each area pair is less than the threshold val...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More