

Medium plate robot welding visual locating device based on structured light three-dimensional vision
A robot welding and three-dimensional vision technology, applied in the field of robot vision, can solve the problems that affect the popularization of welding robots, hinder the application of vision technology, and inconvenient installation, etc., and achieve the effect of increasing the scanning work range, high degree of automation, and less manual intervention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described below in conjunction with accompanying drawing:
[0091] scanning device
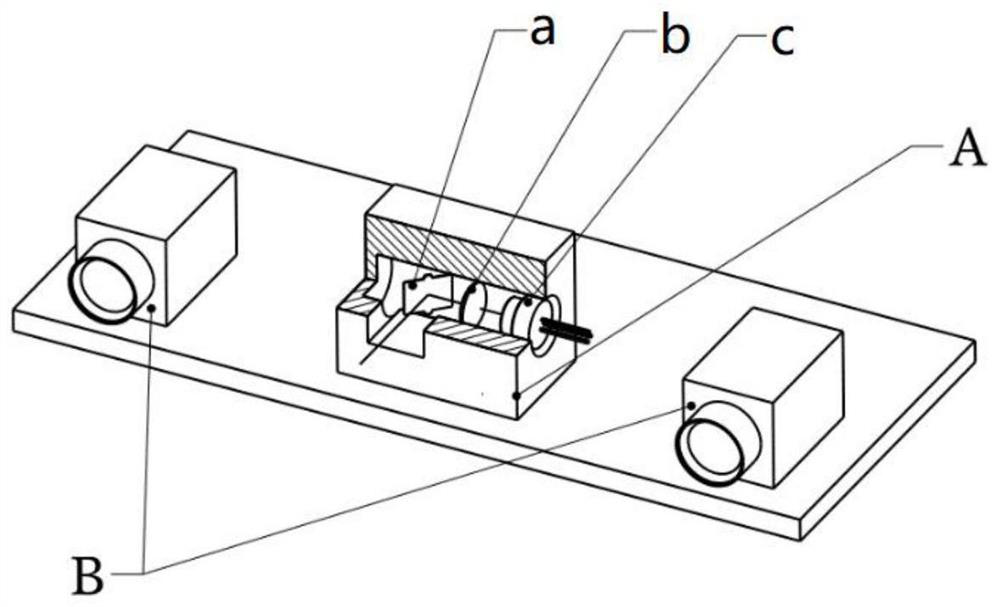
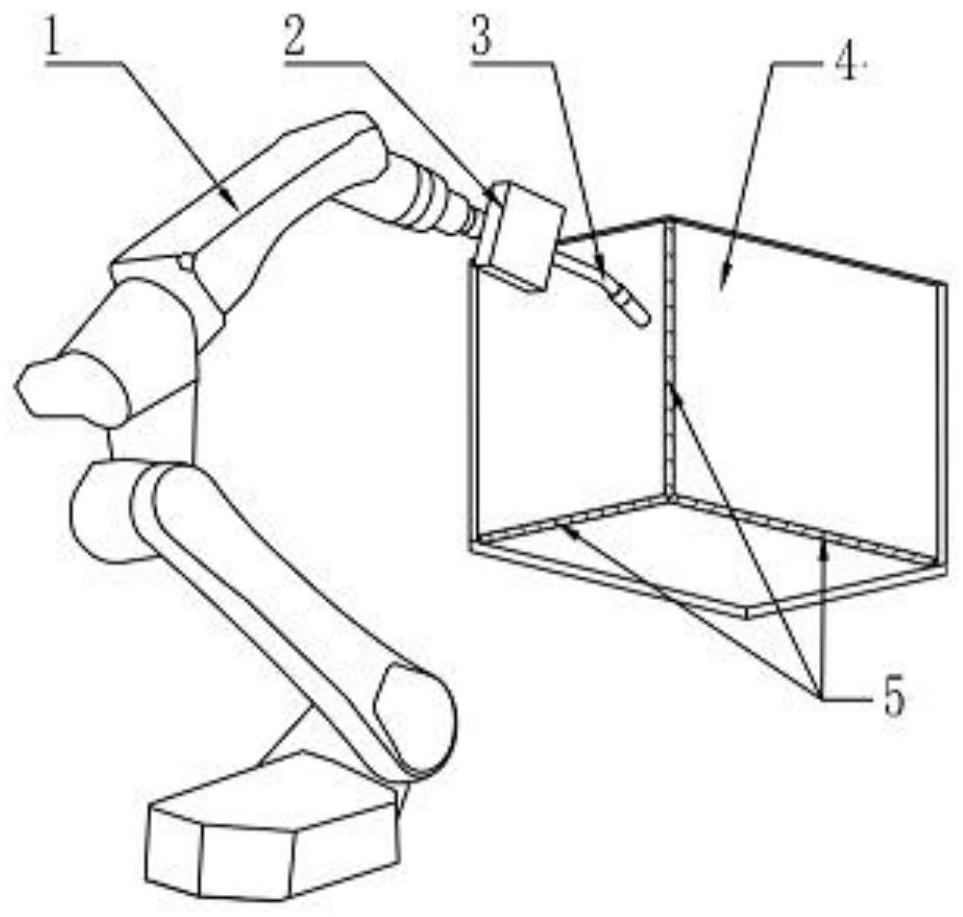
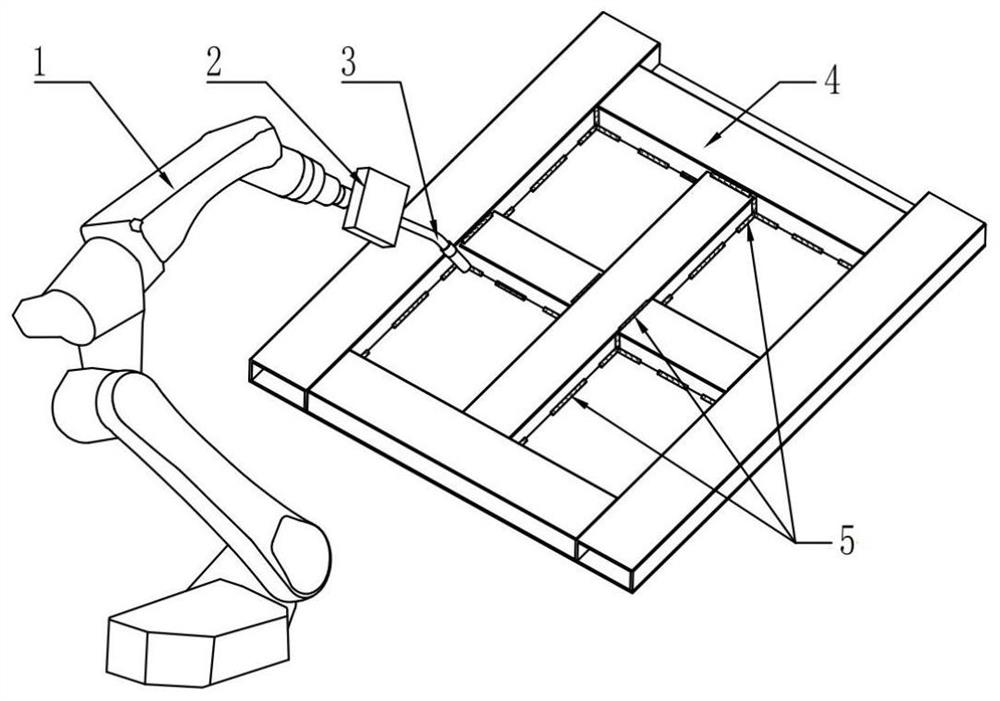
[0092] This paper provides a visual positioning device for medium and thick plate robot welding based on structured light three-dimensional vision. The scanning device is installed at the end of the robot arm. The medium and thick plate is placed within the movement range of the robot arm, and the welded area faces the scanning device. see figure 1 , the scanning device consists of a structured light projection unit A and an image receiving unit B, B is composed of a camera and another camera at a certain distance; A is composed of a semiconductor laser, a line beam shaping focusing lens, a single-axis MEMS micro Mirror composition; Powell prism is selected as the one-line beam shaping focusing lens, and electrostatically driven micromirror is used as the single-axis MEMS micromirror; MEMS micromirror and semiconductor laser are driven and controll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More