Rotation invariant submarine topography two-dimensional matching aided navigation method
A rotational invariance, assisted navigation technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problem of not considering the motion adaptation of the submersible vehicle, the richness of information and the weak adaptability of the algorithm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
[0060] The two-dimensional matching auxiliary navigation method of seabed terrain with rotation invariant characteristics of this embodiment is implemented in the following manner:
[0061] step 1:
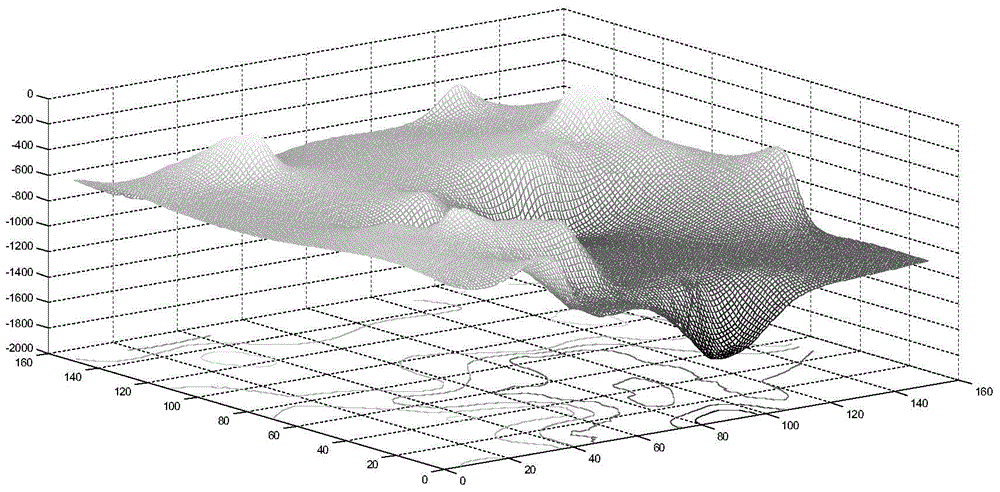
[0062] The real-time strip scanning depth value rectangular array is obtained from the multi-beam bathymetry system, and the background depth value matrix array is obtained from the original prior database according to the main inertial navigation error range. The simulation data is based on the seabed terrain elevation data of 127.528°-128.205° east longitude and 27.328°-28.005° north latitude in the national marine science database, interpolated to form a regular grid data matrix of 100×100m, the matrix size is 751×751, and the terrain is three-dimensional Figure such as figure 1 .
[0063] Convert ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More