

Non-biased momentum single flywheel magnetizing control algorithm
A non-bias, magnetic control technology, applied in the field of satellite flywheel attitude control, can solve the problems of large angular momentum of the momentum wheel, weight, volume and power consumption of the momentum wheel, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
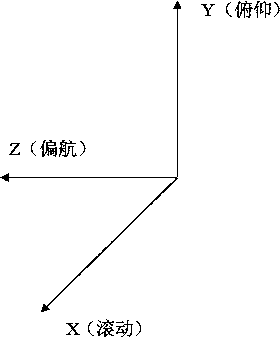
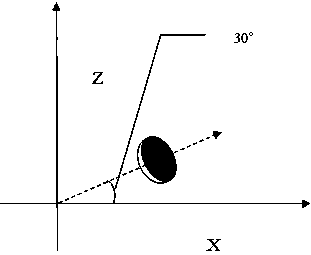
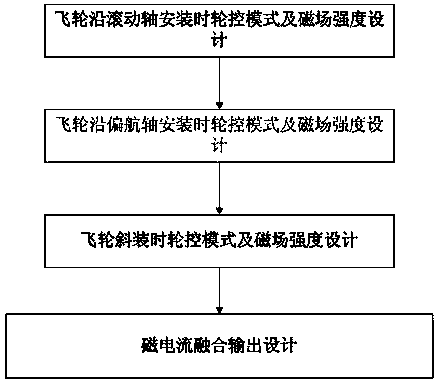
[0093] Such as Figure 1~3 As shown, a non-bias momentum single flywheel magnetization control algorithm includes the following steps:
[0094] Step 1. Install the flywheel along the rolling axis (X axis), determine the wheel control mode and the magnetic field strength for magnetic control:
[0095] When the absolute value of the rolling magnetic field strength is greater than the absolute value of the yaw magnetic field strength, the pitch axis magnetic torque device performs magnetic control on the yaw attitude, and the flywheel controls the rolling attitude by angular momentum exchange; or,
[0096] When the absolute value of the rolling magnetic field strength is less than or equal to the absolute value of the yaw magnetic field strength, the yaw attitude is controlled based on the gyro torque, and the flyw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More