

Robot bird flying controllability evaluation system and evaluation method
A robot bird and evaluation system technology, applied in electrical testing/monitoring, etc., can solve problems such as repetitive labor, lack of definition of the range of stimulation intensity, lack of evaluation of the relationship between controllable sensitivity and stimulation intensity, etc., to improve work efficiency , Avoid the effect of blind and repetitive ineffective work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
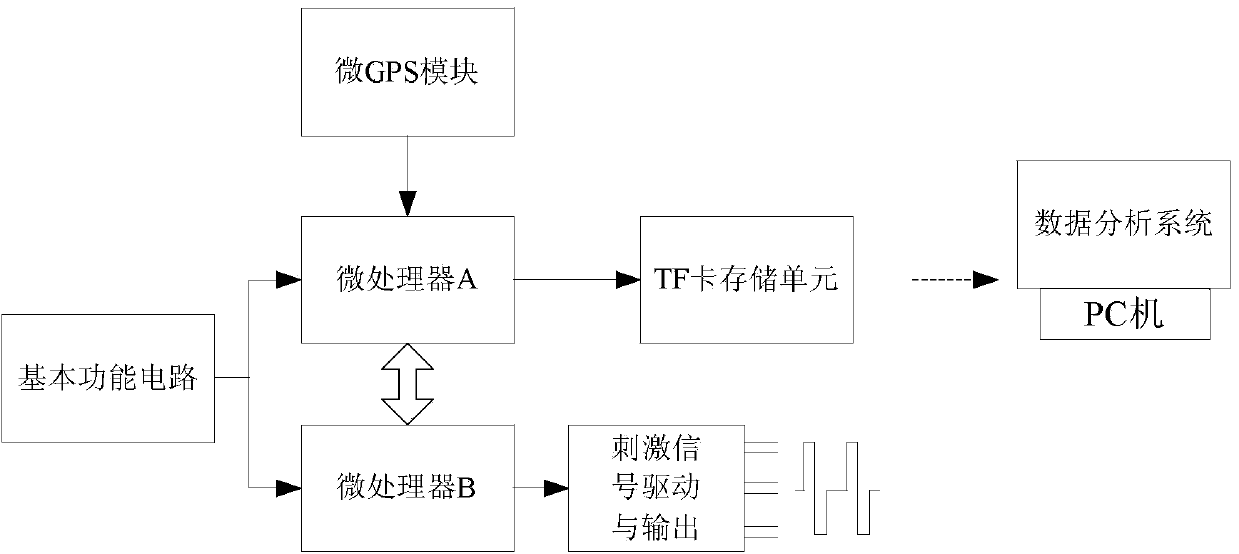
[0046] The specific implementation of the present invention will be described in conjunction with the examples, such as figure 1 As shown, the robot bird flight controllability evaluation system includes microprocessor A, microprocessor B, micro GPS module, TF card storage unit, basic functional circuit, stimulation signal drive and output unit, and PC-based data analysis system ;
[0047] The microprocessor A selects the C8051F006 single-chip microcomputer, which has 32K bytes of in-system programmable Flash, 2304 bytes of RAM, 32 general I / O ports, 1 UART, 1 IIC and 1 SPI interface. Microprocessor B chooses C8051F330 microcontroller, which has 8K bytes of in-system programmable Flash, 768 bytes of RAM, 17 general I / O ports, 1 IIC and 1 10-bit current output DAC.
[0048] The micro GPS module selects a GPS module of FGPMMOPA6H model, which integrates a GPS receiver and a receiving antenna, and is small in size and light in weight.
[0049] For the TF card storage unit, a TF card wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More