

Track control device
A trajectory control and trajectory technology, which is applied in the field of trajectory control devices, can solve the problems of inconsistency and inconsistency of machining shapes, and achieve the effect of trajectory error suppression.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
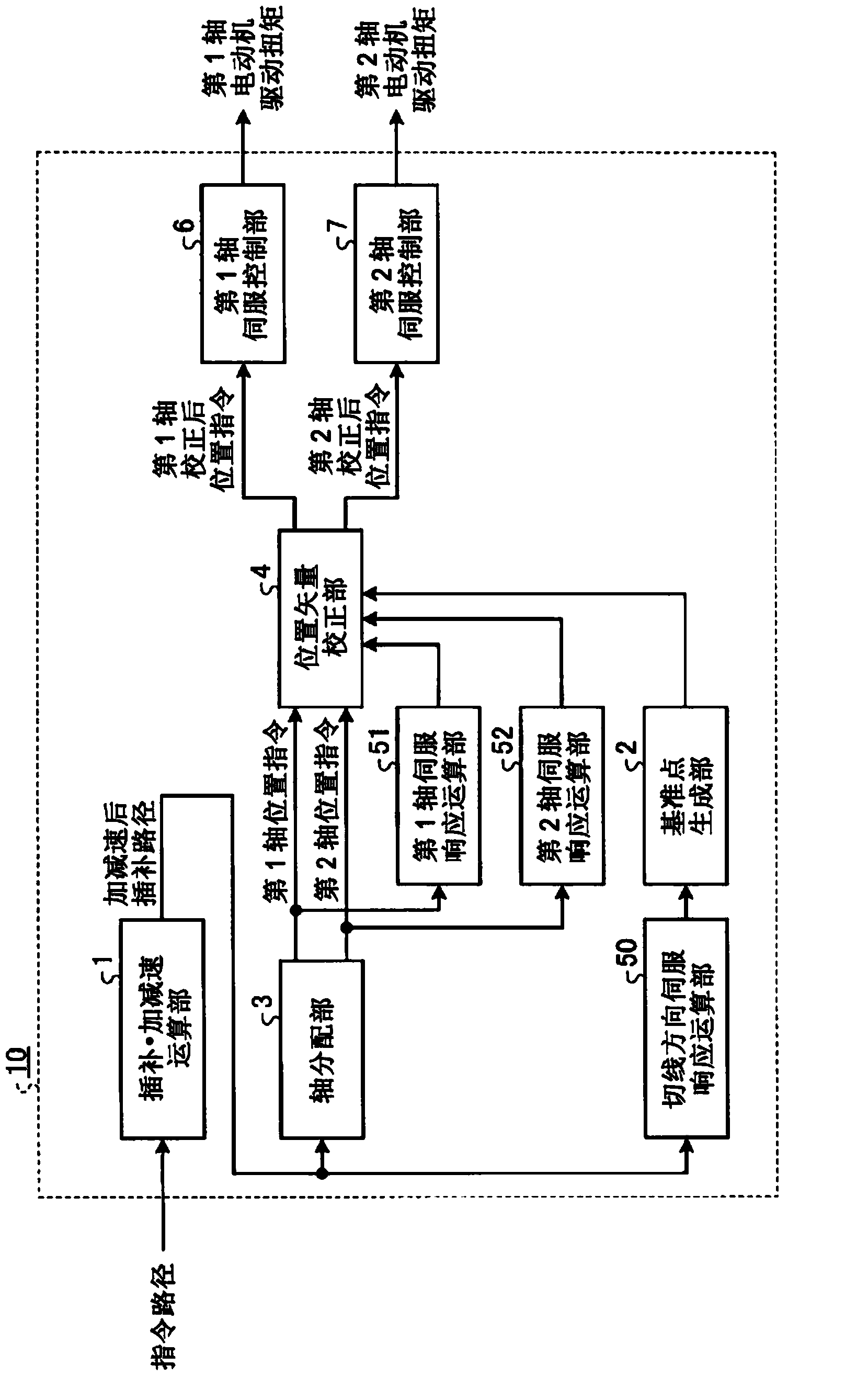
[0024] figure 1 It is a block diagram which shows the structure of the trajectory control apparatus 10 which concerns on Embodiment 1 of this invention. The commanded path is supplied to the interpolation / acceleration / deceleration calculation unit 1 in the form of an NC program or the like as a coordinate value on the locus of the movable part of the machine. In addition, the interpolation method (straight line, arc, spline curve, etc.) between the commanded coordinate values and the movement speed in the trajectory direction, that is, the feed rate, are simultaneously supplied to the interpolation, acceleration and deceleration by using the NC program or the like. Operation part 1. In the interpolation / acceleration / deceleration calculation unit 1, by interpolating between the commanded coordinate values by the specified method, acceleration is performed along the command path with a predetermined acceleration or acceleration / deceleration time constant specified separatel...
Embodiment approach 2
[0063] Figure 5 It is a block diagram which shows the structure of the trajectory control apparatus 15 which concerns on Embodiment 2 of this invention. The difference from Embodiment 1 is that there are three movable axes of the machine, and a servo control unit (a first axis servo control unit 6, a second axis servo control unit 7, and a third axis servo control unit) is provided for each movable axis. section 8) and a servo response calculation section (a first axis servo response calculation section 51, a second axis servo response calculation section 52, and a third axis servo response calculation section 53). The structure other than this is the same as that of Embodiment 1.
[0064] In the present embodiment, a command including a three-dimensional shape is given to a machine having three movable axes, the X axis, the Y axis, and the Z axis. Let the X axis be the first axis, the Y axis be the second axis, and the Z axis be the third axis. The standard model gains of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More