

A branch pruning and crushing robot and its method for pruning broken branches
A technology of robots and pulverizers, applied in botany equipment and methods, agricultural machinery and implements, cutting tools, etc., can solve the problems of less research on automatic pruning, and achieve the effects of promoting development, reducing usage, and reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
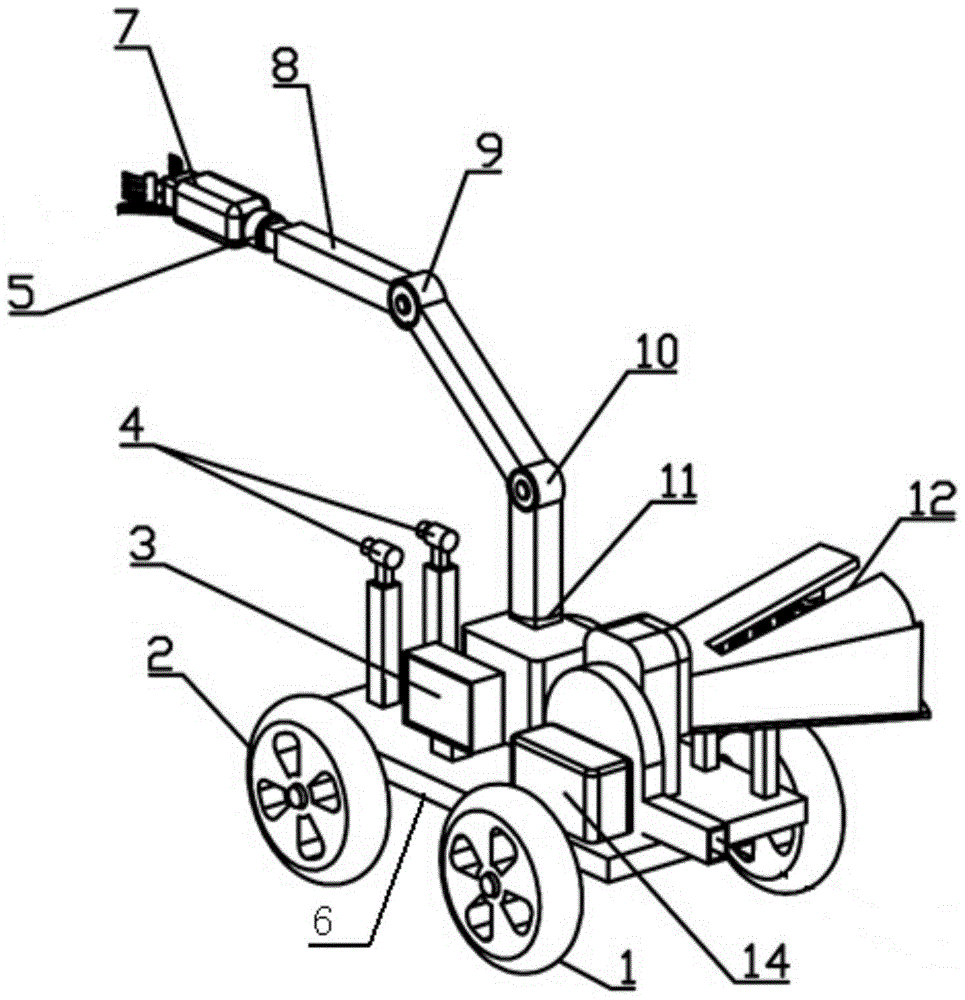
[0034] like Figure 1-4 shown. A branch pruning and crushing robot of the present invention comprises: a mechanical arm installed on a frame 6, a pruning end effector 7 installed on the front end of the mechanical arm, a control unit 3 installed on the frame 6, and a Camera 4, driving wheel assembly 1 and driven wheel assembly 2 installed on the frame;
[0035] The mechanical arm includes a wrist revolving joint 5, a telescopic arm 8, an elbow revolving joint 9, an arm revolving joint 10, and a waist revolving joint 11 connected in sequence;
[0036] The actions of the trimming end effector 7, the camera 4, the driving wheel assembly 1 and the driven wheel assembly 2 are controlled by the control unit 3;
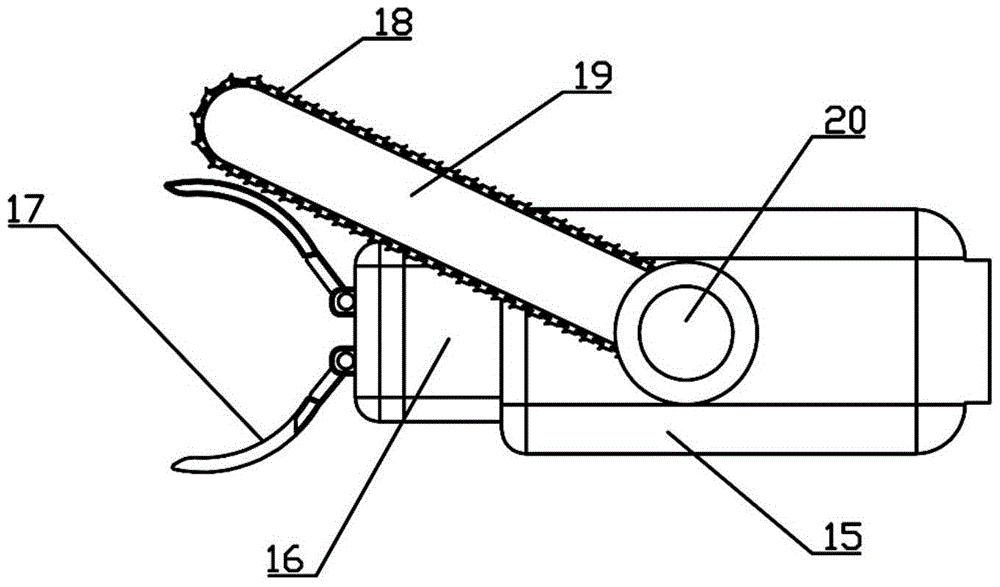
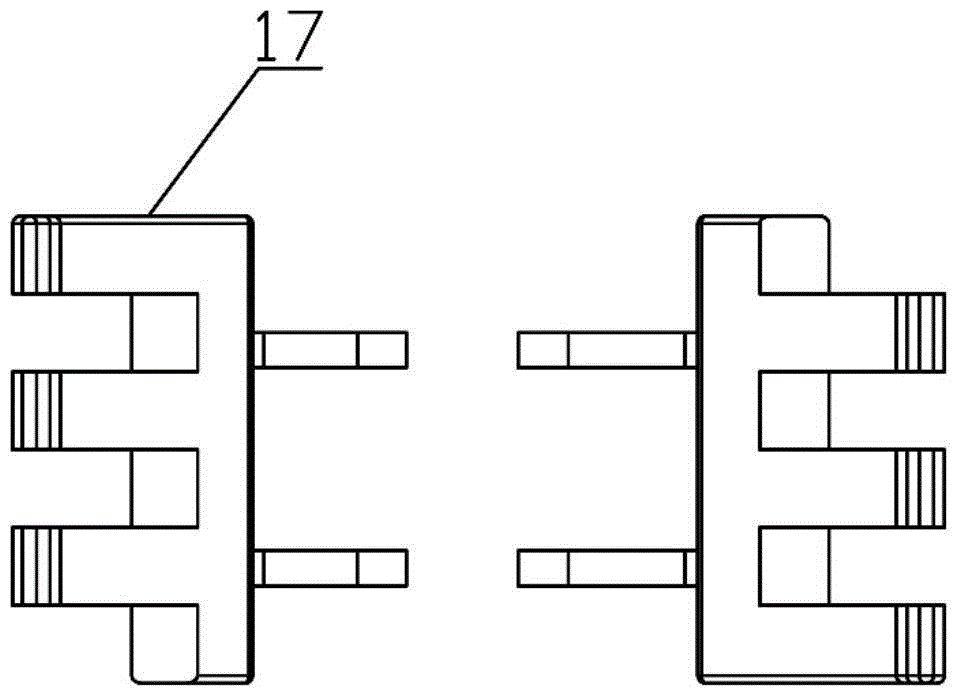
[0037] The mechanical arm includes a motor 15, a finger driving device 16, a forked finger 17, a saw blade 18, a saw blade shaft 19, and a saw blade shaft driving device 20; the motor 15 drives the finger driving device 16 and the saw blade shaft driving device 20; The sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More