

Robot operation platform for natural orifice transluminal endoscopic surgery
A technology of robotic surgery and natural orifices, applied in the field of robotic surgical platforms, can solve problems such as simplicity, unstable operating platforms, and narrow surgical operation triangles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below by means of drawings and examples.
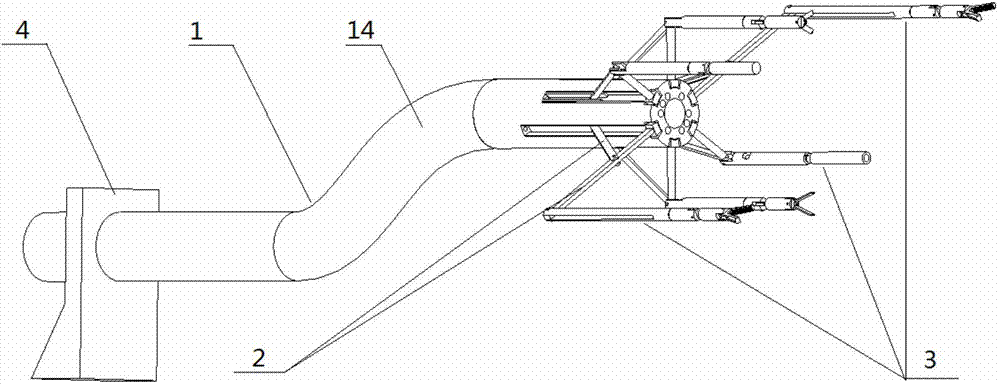
[0025] control figure 1 , the robotic surgical platform for natural orifice endoscopic surgery according to the present invention includes a delivery pipeline 1 , a spoke 2 , a robot arm 3 and a base 4 . The delivery pipeline 1 is connected in the base 4 . The delivery pipeline 1 has a curved portion 14, which is adapted to the skeletal physiological curvature of the human body's pelvis and abdomen, so as to prevent the delivery pipeline 1 from being introduced into the human body's pelvis and abdomen and from damaging human organs during the operation.
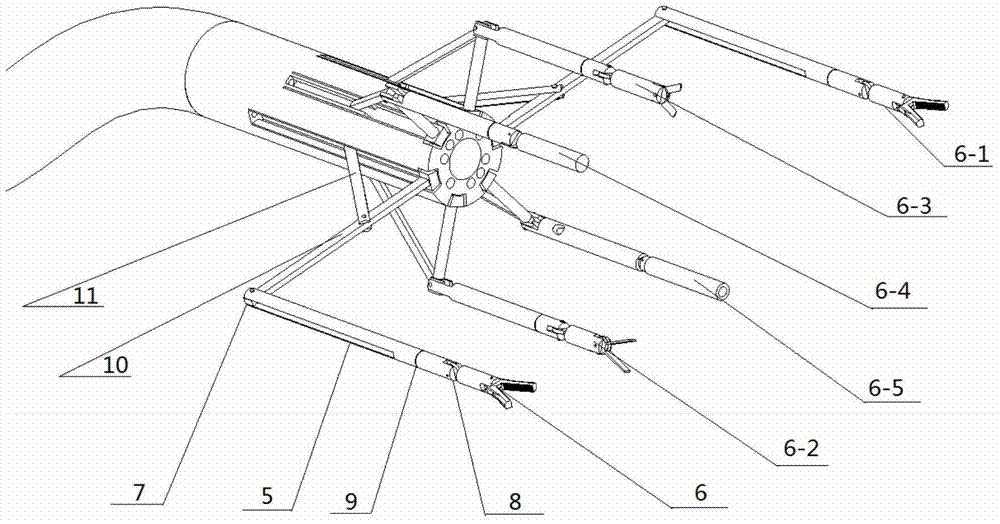
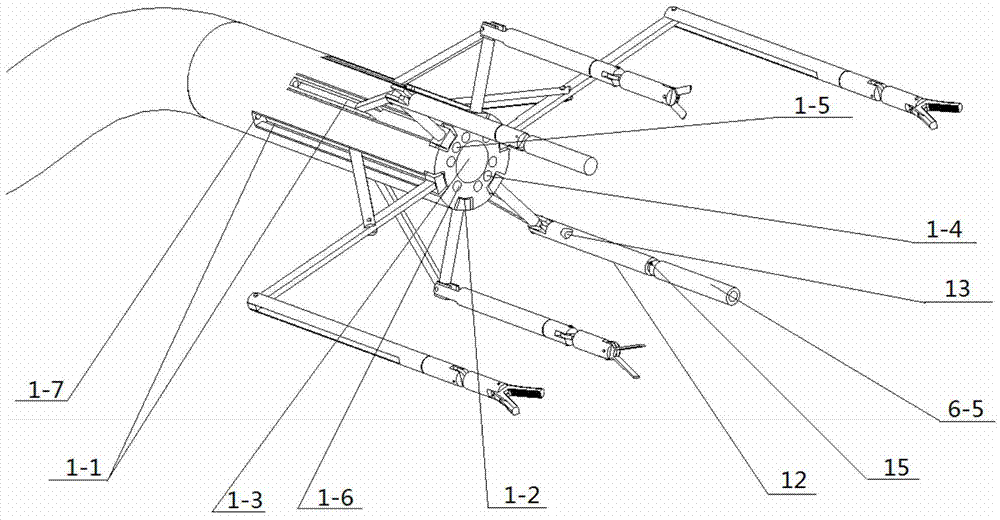
[0026] control figure 2 , the robot arm 3 is composed of a robot arm 5 , a robot hand 6 , a robot shoulder joint 7 , a robot wrist joint 8 and a robot horizontal joint 9 . The robot arm 5 is connected with the upper spoke 10 through the robot shoulder joint 7 , the robot arm 5 is connected with the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More