

Jitter-free sliding mode position control method for motor servo system based on disturbance compensation
A servo system and motor position technology, applied in the direction of feedback control, adaptive control, general control system, etc., can solve the problems of system modeling uncertainty, high gain feedback, jitter phenomenon, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
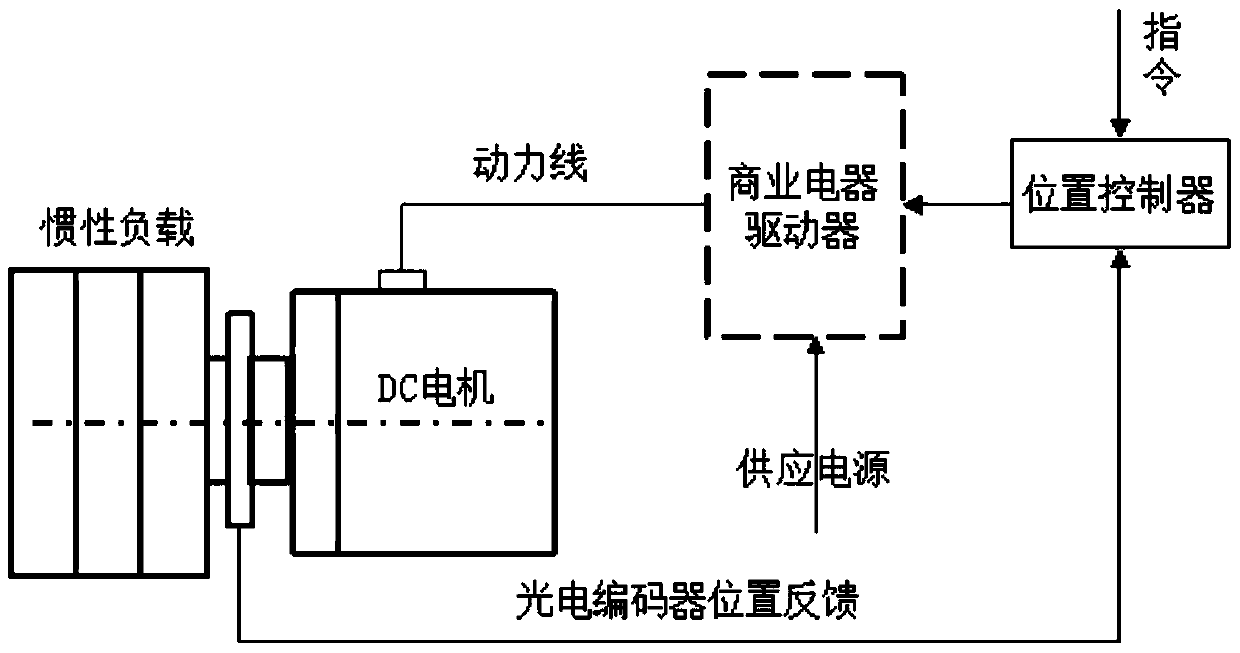
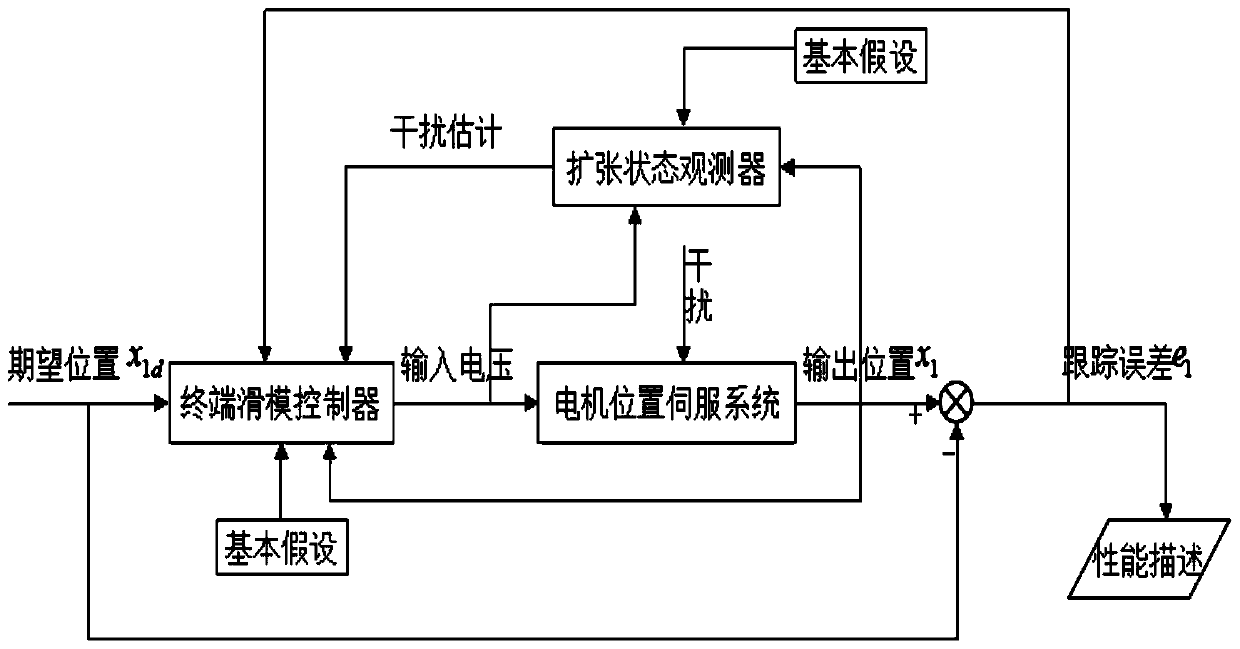
[0072] combine Figure 1-Figure 3 As shown, according to a preferred embodiment of the present invention, a vibration-free sliding mode position control method of a motor servo system based on disturbance compensation, the specific steps for its realization are as follows:
[0073] Step 1. Establish the mathematical model of the motor position servo system
[0074] Most of the existing model-based high-performance control strategy designs for motor servo systems use second-order kinematics models or third-order models with first-order electrical dynamics for controller design, in which the system control input u and The output force of the motor is linearly proportional, and the third-order model usually considers the dynamic process of the original electricity on the basis of the second-order mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More