

Intelligent driving system with driver model
A driver model and intelligent driving technology, applied in the automotive field, can solve problems such as increasing or reducing the suspension system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
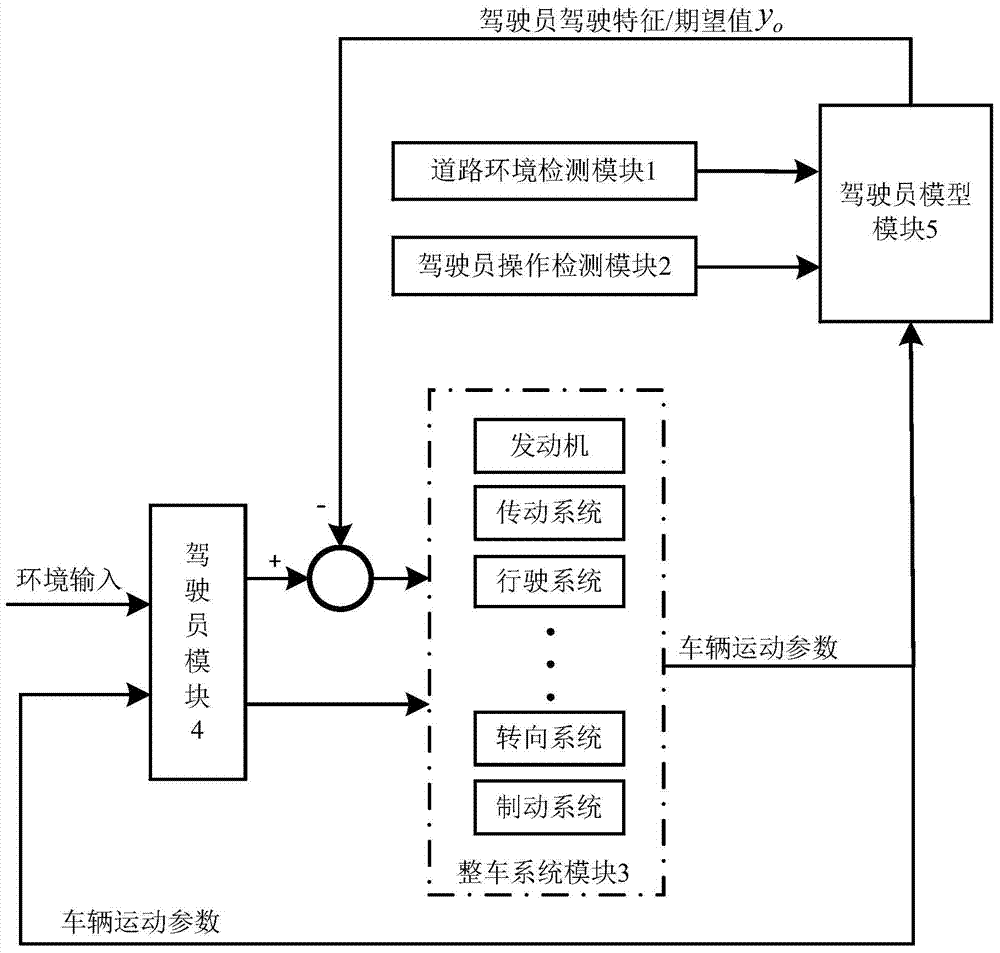
[0021] like figure 1 As shown, an intelligent driving system including a driver model according to an embodiment of the present invention includes: a road environment detection module 1 , a driver operation detection module 2 , a vehicle system module 3 , a driver module 4 and a driver model module 5 .
[0022] Specifically, the road environment detection module 1 is used to collect road environment information in real time and output relevant data, wherein the road environment information includes visual information, such as road adhesion coefficient, road curvature, road width, road gradient and traffic flow. Therefore, the road environment detection module 1 can output the road adhesion coefficient parameter for the road surface adhesion coefficient, the road curvature parameter for the road curvature, the road width parameter for the road width, the road gradient parameter for the road gradient, The density parameter of the vehicle is output for the traffic on the road.
...
Embodiment 2
[0043] like image 3 As shown, according to another aspect of the present invention, a vehicle driving method is provided, comprising the following steps:
[0044] 1) First, before the vehicle starts, the current state of the vehicle, the current state of the driver and the state of the road ahead are automatically detected, and the data is transmitted and calculated by the ECU.
[0045] 2) Detect the road curvature radius ρ(t) at the current time t, and judge whether the vehicle will enter the curve, that is, judge whether ρ(t)=∞ is established; if so, it means that the vehicle is driving in a straight lane, and calculate t The road curvature radius ρ(t+Δt) at the time +Δt; if ρ(t)<∞, it means that the vehicle is about to or has entered the curve, and the road curvature radius ρ(t+Δt) at the time t+Δt is calculated.
[0046] 3) Detect the steering wheel angle imposed by the driver on the steering wheel, that is, the actual steering wheel angle δ s .
[0047] 4) Detect the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More