

Parameter self-correcting method of position loop IP controller of alternating current servo system
A technology of AC servo and servo system, which is applied in the control of electromechanical brakes, control systems, control generators, etc., and can solve problems that depend on the structure of the controlled model and the accuracy of parameter identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
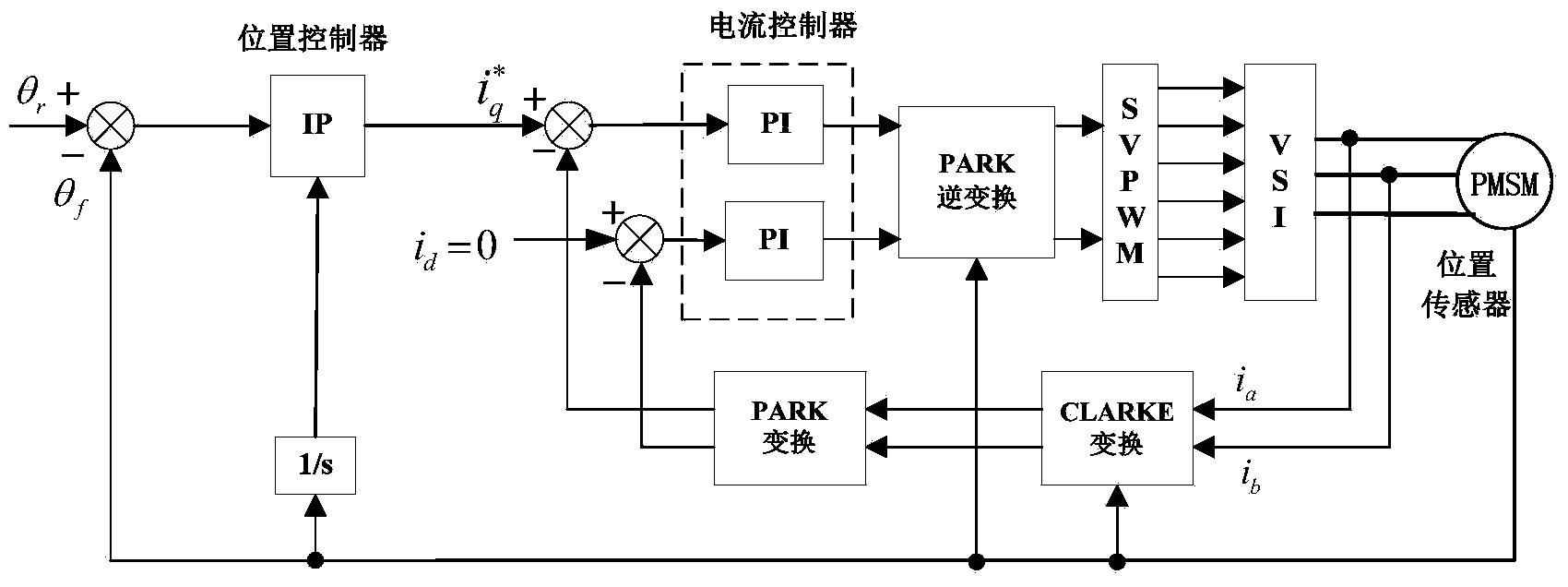
[0043] Such as figure 1 as shown, figure 1 It is a schematic diagram of the vector control structure of the servo system of the present invention. The essence of the vector control process is to transform the three-phase current in different reference coordinate systems, and finally transform it into an orthogonal variable to achieve the purpose of complete decoupling; then adopt an appropriate control algorithm; The process is transformed to obtain the control amount of the servo motor, so as to complete the control process.
[0044] In practical engineering applications, usually i d = 0 to achieve approximate decoupli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More