

ADRAC (active-disturbance-rejection adaptive control) method for hydraulic motor position servo system
A technology of adaptive control and adaptive controller, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as controller performance deterioration, achieve good tracking performance, overcome conservatism, and improve accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0194] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the hydraulic motor position servo system:
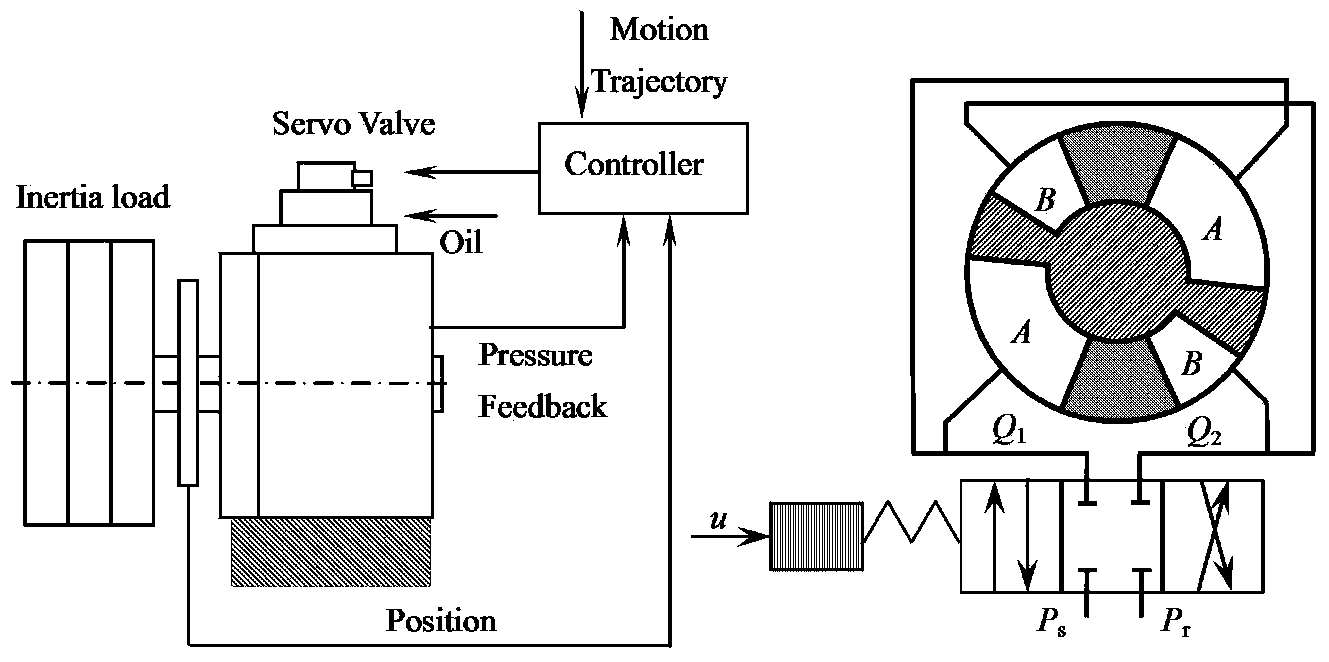
[0195] Load moment of inertia m=40kg·m2 , Motor displacement A=2×10 -4 m 3 / rad, viscous friction coefficient B=80N m s / rad, oil supply pressure P s =7MP a , return oil pressure P r =0, oil elastic modulus β e =2×10 8 P a , the total control volume V of the two chambers of the motor t =2×10 -3 m 3 , leakage coefficient C t =9×10 -12 m 3 / s / P a , total flow gain Coulomb friction amplitude A f =10N·m, shape function Pressure dynamic modeling error Q(t)=1×10 -4 m 3 rad / s.
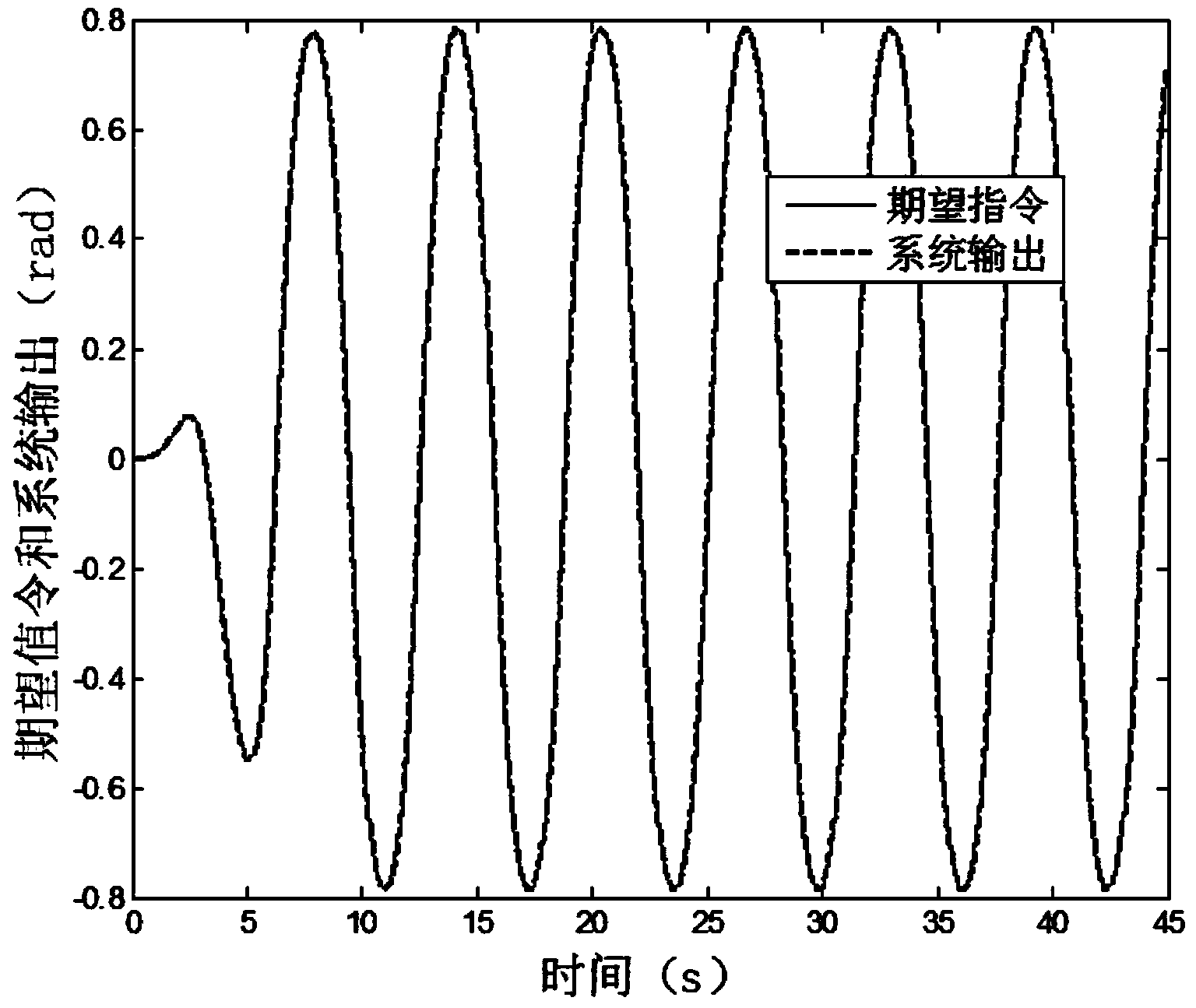
[0196] The desired instruction for a given system is x 1d =sin(t)[1-exp(-0.01t 3 )] (rad). Take the following controller for comparison:
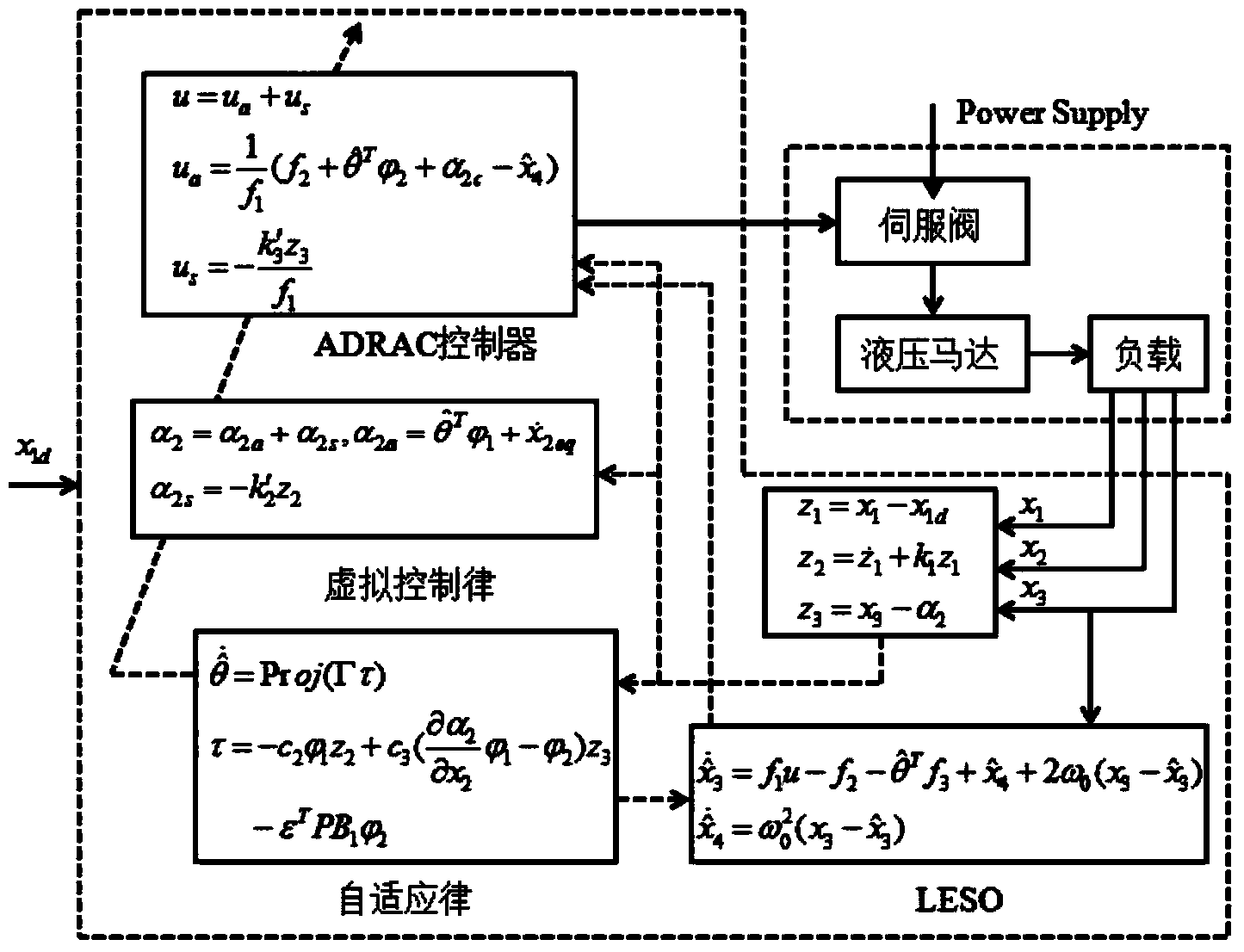
[0197] Active Disturbance Rejection Adaptive (ADRAC) Controller:
[0198] Get controller parameters: k 1 = 500 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More