

Robot walking control method based on foothold compensator
A technology of walking control and foothold, applied in two-dimensional position/channel control, adaptive control, general control system, etc., can solve the problem of long learning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
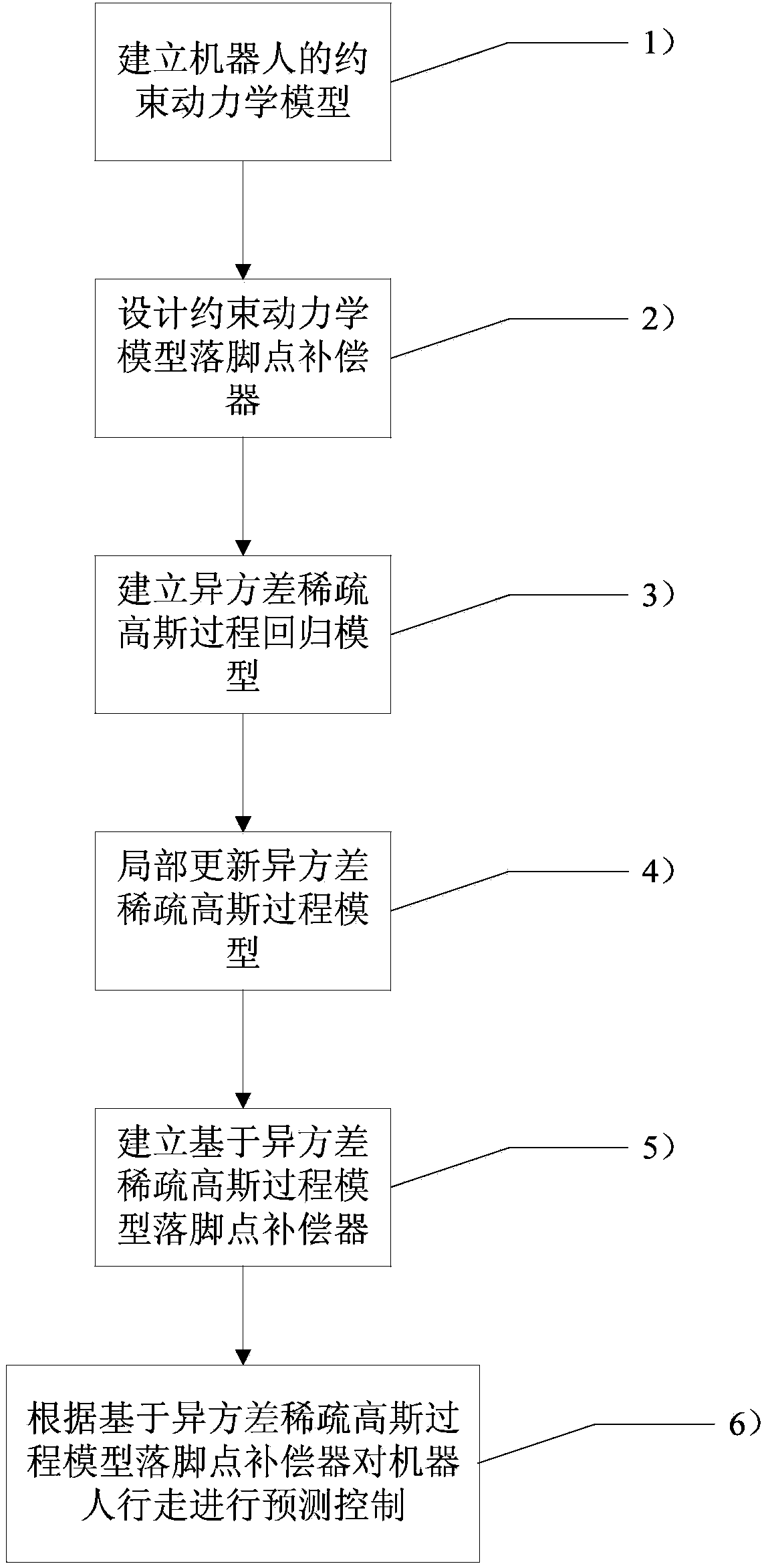
[0069] Such as figure 1 As shown, a robot walking control method based on foothold compensator includes the following steps:
[0070] 1) Establish the constraint dynamic model of the robot;
[0071] 2) Design the foothold compensator of the constrained dynamic model according to the constrained dynamic model;
[0072] 3) Establish a heteroscedastic sparse Gaussian process regression model to realize the mapping calculation from input to output of foothold compensator;
[0073] 4) Locally update the heteroscedastic sparse Gaussian process model;
[0074] 5) Establish a foothold compensator based on the heteroscedastic sparse Gaussian process model;
[0075] 6) Predictive control of robot walking based on foothold compensator based on heteroscedastic sparse Gaussian process model.
[0076] Step 1) includes the following steps:
[0077] 11) Establish the three-dimensional linear inverted pendulum dynamics model of the robot, the expression of the dynamics model is:
[0078]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More