

4SPR+2R type four-freedom-degree parallel mechanism
A degree of freedom, parallel technology, applied in the field of robotics, to achieve the effect of large working space, high rigidity, and simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
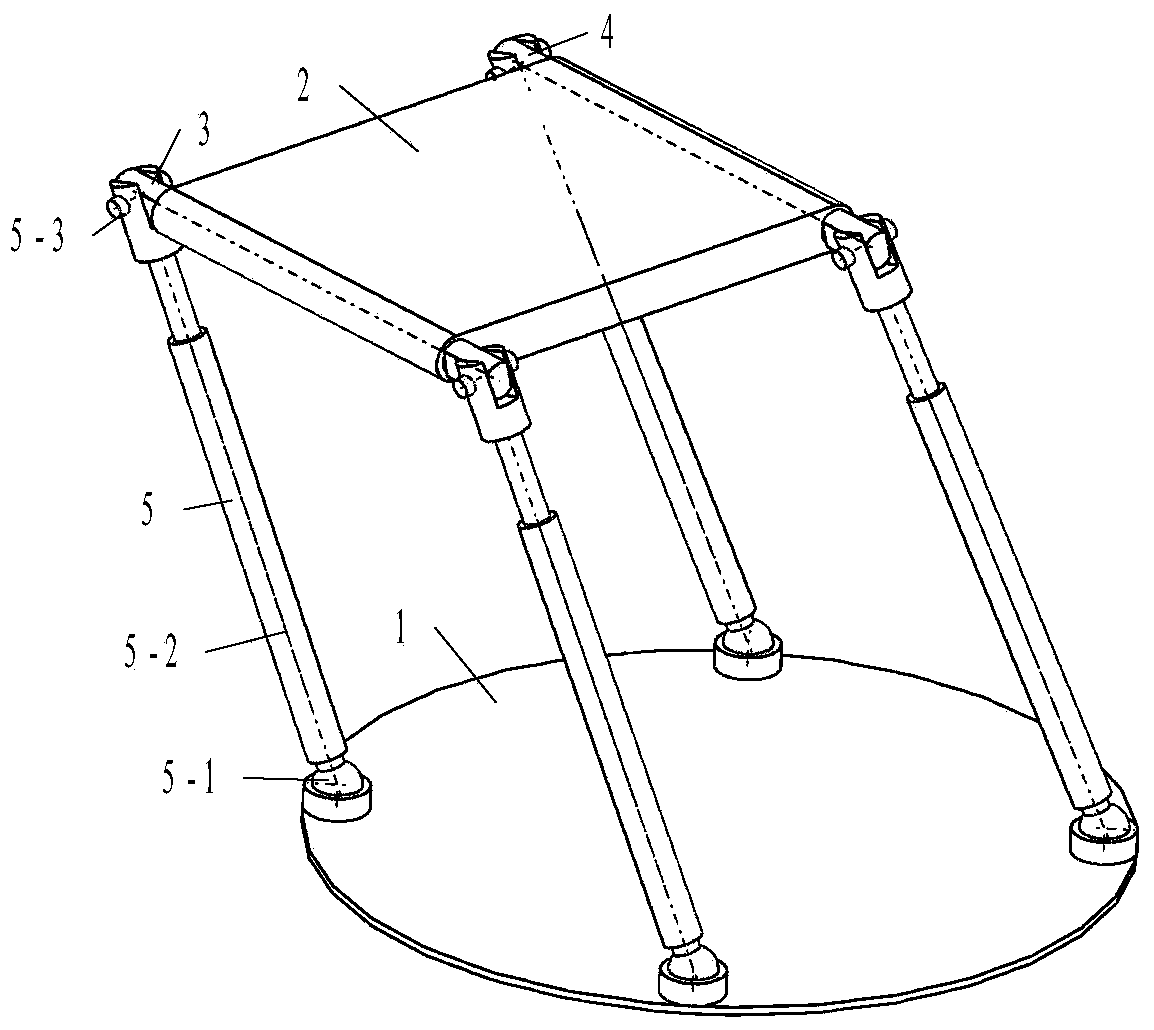
[0012] exist figure 1 In the schematic diagram of the 4SPR+2R type four-degree-of-freedom parallel mechanism, the base 1 is four sub-rods, and the circular plate of the base is provided with four ball sub-seats, and the four ball sub-seats are evenly distributed near the circle The circumference of the edge of the shaped plate; the moving platform 2 is a pair of secondary rods, and the two opposite sides of the regular quadrilateral plate of the moving platform are respectively provided with through holes parallel to each other, and the first transverse axis 3 and the second transverse axis 4 respectively pass through Through the through holes on both sides of the above-mentioned moving platform, through holes are provided at both ends of the two horizontal shafts protruding from the through holes, and the axes of the through holes at the two ends of each horizontal shaft are parallel to each other and perpendicular to the horizontal axis; the four structures are the same The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More