A flexible joint for articulated robots
A flexible joint and robot technology, applied in the field of robots, can solve problems such as unfavorable practical application and miniaturization of robots, affecting the stability of robot motion, and unfavorable quadruped robots, etc., to achieve the effect of compact structure, reduction of rigid impact, and improvement of service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiment is based on the specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims of the present application is not limited to the description scope of the embodiments.
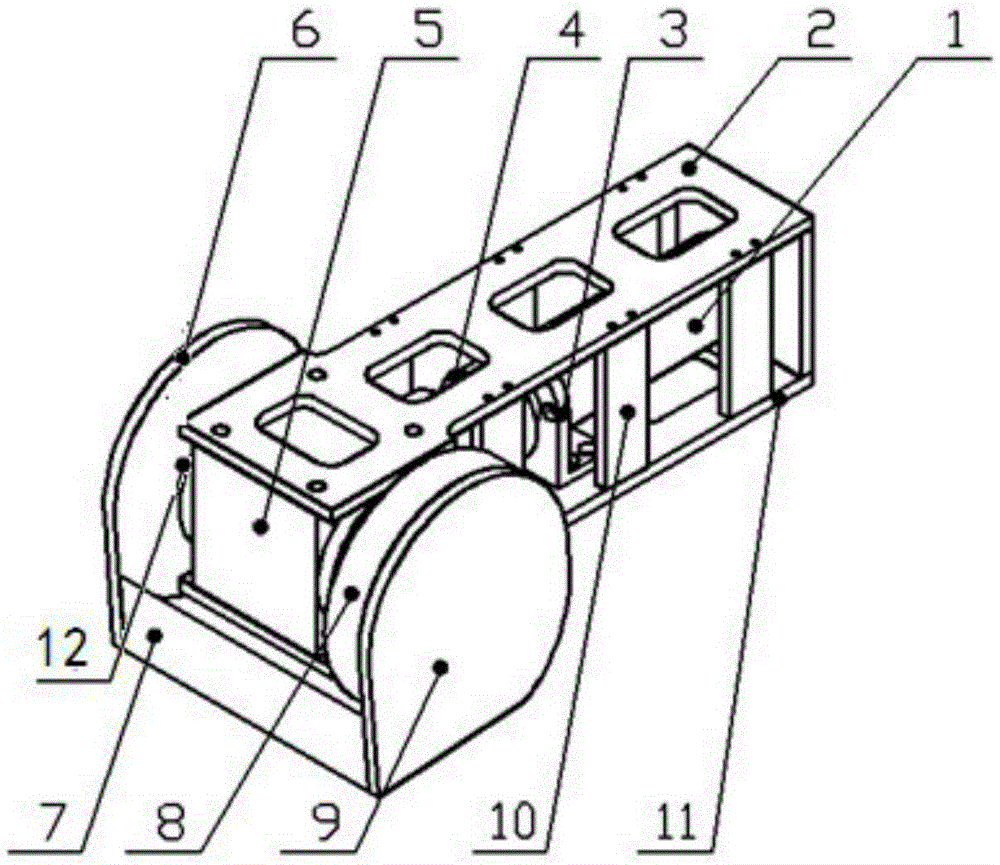
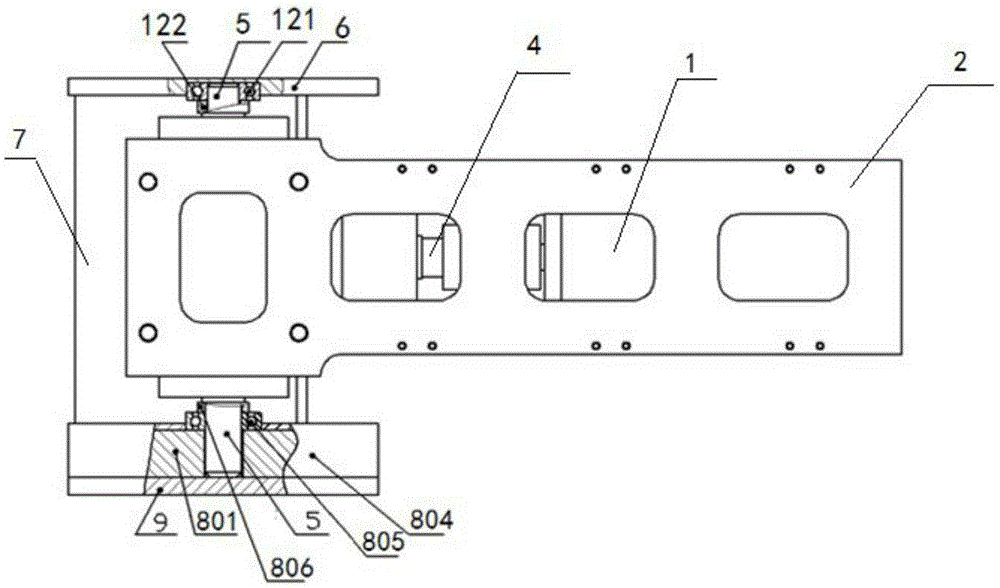
[0014] The present invention is used for the flexible joint of articulated robot (joint for short, see Figure 1-3 ) includes a motor 1, a joint connecting plate 2, a motor frame 3, a coupling 4, a bevel gear commutator 5, a first connecting plate 6, a connecting frame 7, a flexible output end 8, a second connecting plate 9, and a supporting plate 10 , the joint mounting plate 11 and the support end 12; the joint connecting plate 2 and the joint mounting plate 11 are fixedly connected through the support plate 10, the motor 1 is fixedly connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More