

A control method for stable walking of a humanoid robot
A technology of humanoid robot and control method, which is applied in the field of stable walking control of humanoid robot, and can solve problems such as the internal relationship between swing arm and balance that have not been deeply explored
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments. This embodiment is implemented on the premise of the technical solution of the present invention, and provides a detailed implementation manner and a specific operation process, but the protection scope of the present invention is not limited to the following embodiments.
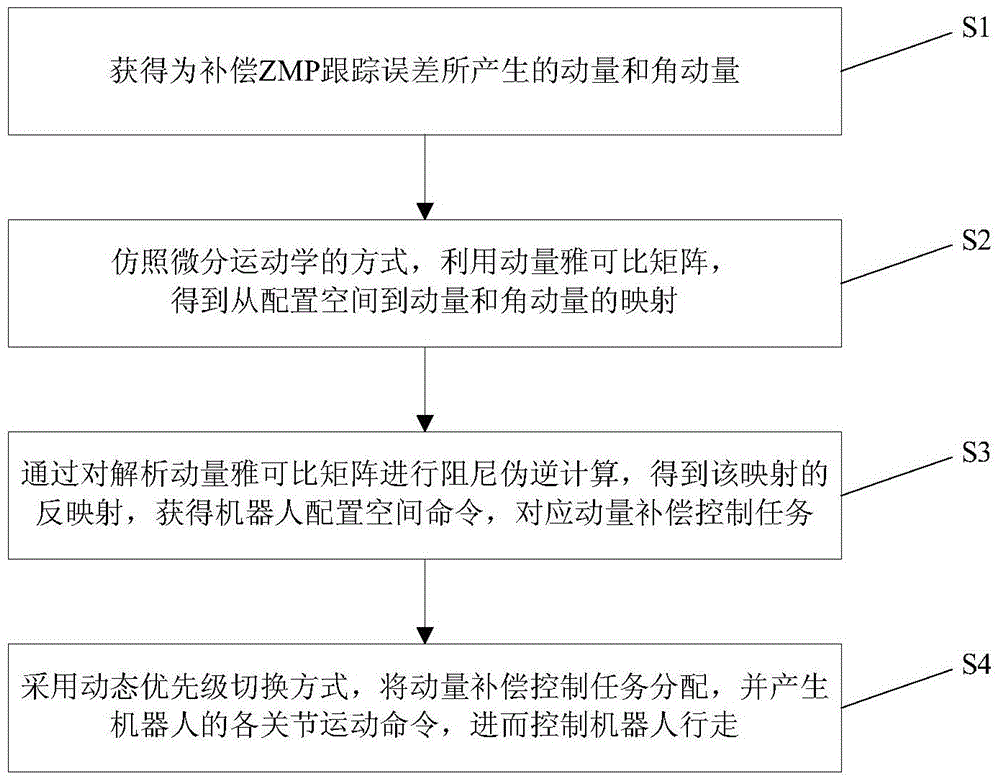
[0056] like figure 1 As shown, a control method for stable walking of a humanoid robot, the method includes the following steps:
[0057] Step S1: Obtain the momentum and angular momentum that the robot system needs to generate to compensate for the ZMP tracking error.
[0058] Step S1 specifically includes:
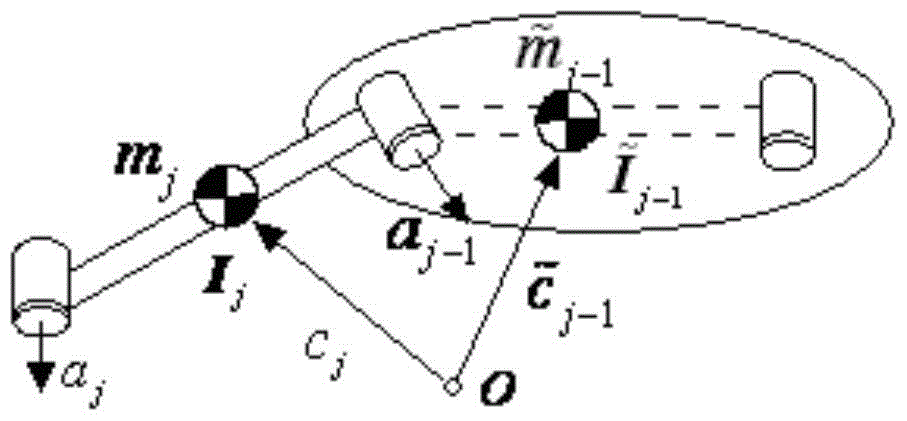
[0059] 101: It is known that for a humanoid robot, when considering the inertia tensor when each link rotates, the ZMP calculation formula of the robot is constructed based on the coordinate system, and the ZMP of the robot can be calculated by the following formula: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More