

Insulator cleaning robot
A technology for cleaning robots and insulators, which is applied in the direction of instruments, chemical instruments and methods, cleaning methods and appliances, etc., can solve the problems of slow moving speed, slow cleaning speed, interference, etc., and achieve stable operation, avoid wear, and wear less effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
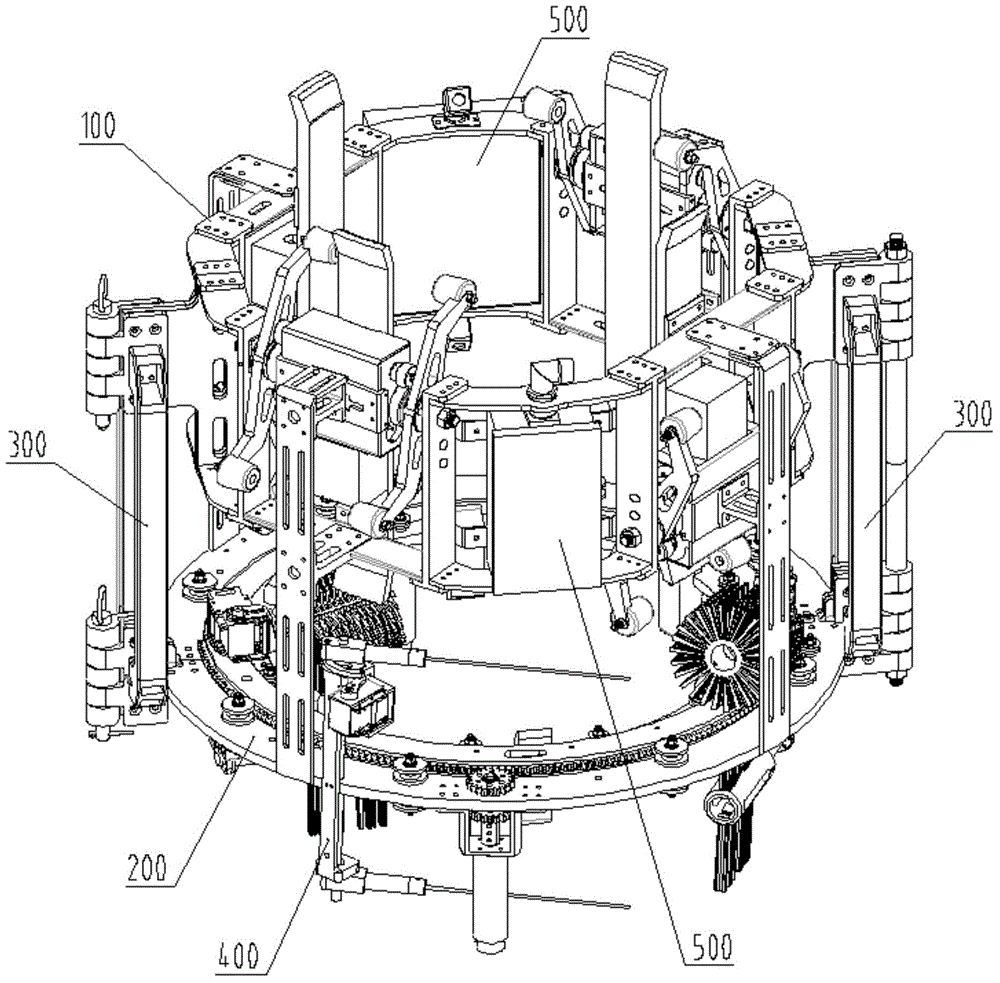
[0048] Such as figure 1 As shown, the robot as a whole has a circular structure, including a crawling mechanism 100 , a cleaning mechanism 200 , a locking mechanism 300 , a detection mechanism 400 and a battery control system 500 . The crawling mechanism 100 and the cleaning mechanism 200 are connected through the locking mechanism 300 , the detection mechanism 400 is arranged on one side of the locking mechanism 300 , and the battery control system 500 is arranged on the crawling mechanism 100 .
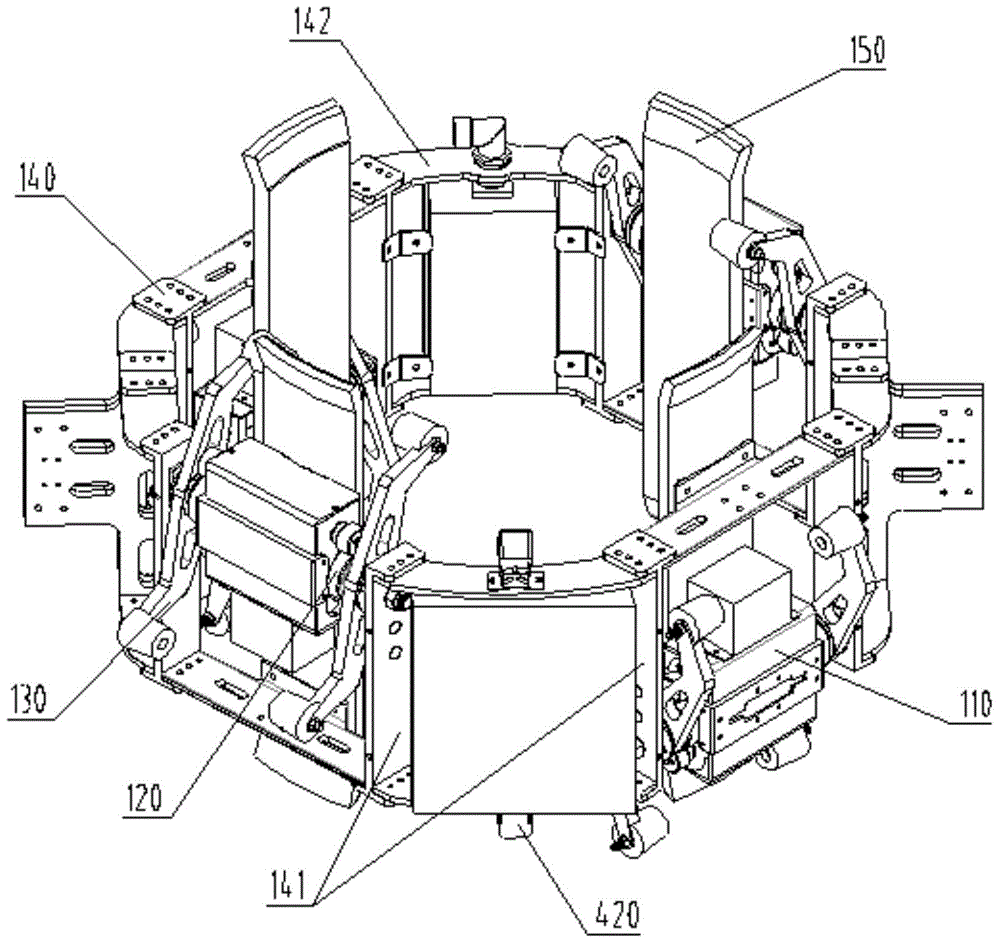
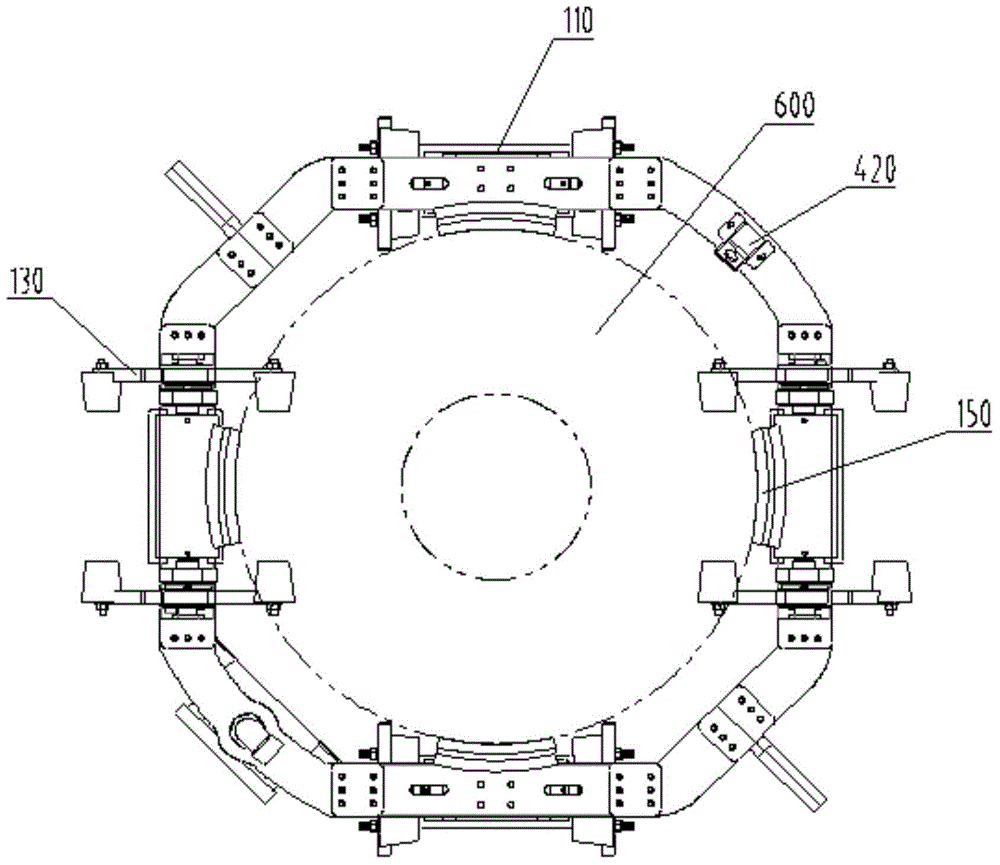
[0049] Such as figure 2 , image 3 , Figure 4 As shown, the robot crawling mechanism 100 is a closed circular structure, surrounded by insulator strings, and can be opened and closed. It is mainly composed of a driving mechanism 110, a connecting mechanism 140 and a number of guide plates 150. The sheet is symmetrical in the radial plane, and each driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More