

Cylindrical coordinate robot
A technology of cylindrical coordinates and robots, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as weak rigidity, large footprint, and uncompact structure, and achieve good stability and rigidity, and occupy an area Small, compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
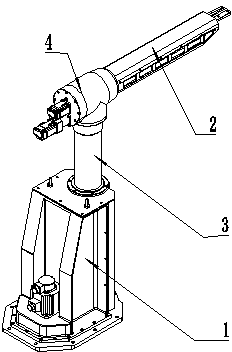
[0026] Example 1 :like Figure 1-9 As shown, a cylindrical coordinate robot includes a Z-axis 1 that can move in the Z-direction, an X-axis 2 that can move in the X-direction, a rotation axis 3 that can rotate in the Z-direction, and a flip axis that can rotate in the X-direction 4; wherein, the rotation axis 3 is arranged on the Z axis 1 , the inversion axis 4 is arranged on the rotation axis 3 , and the X axis 2 is arranged on the inversion axis 4 .
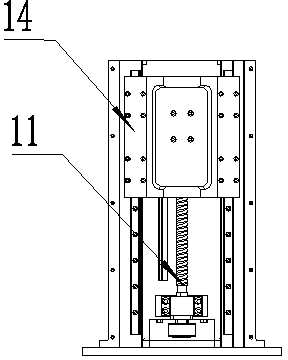
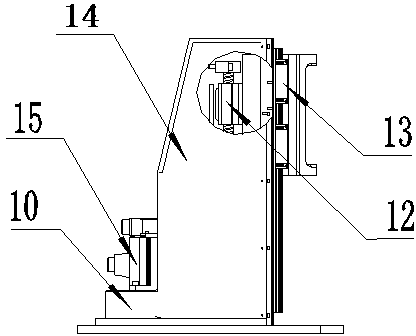
[0027] The Z-axis 1 includes a base 10 on which a lead screw transmission device 11 is arranged along the Z direction, and the lead screw transmission device 11 includes a nut seat 12 on which Z is arranged. The shaft lifting seat 13 is provided with a casing 14 fixed on the base 10 outside the screw drive 11 , and an AC for driving the screw drive 11 is also provided on the base 10 Servo motor 15.
[0028] The rotating shaft 3 includes an AC servo motor 30, a planetary reducer 31 and a transmission shaft 32 arranged along ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More