System and method for controlling interconnecting state of transversely interconnected air suspension
A technology of state control and air suspension, applied in the direction of suspension, elastic suspension, transportation and packaging, etc., can solve the problem of interconnected air suspension control and interconnected hydraulic suspension control. Suspension control, control inaccuracy, vehicle safety hazards and other issues, to solve the contradiction between ride comfort and handling stability, take up less chassis space, and improve ride ride comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
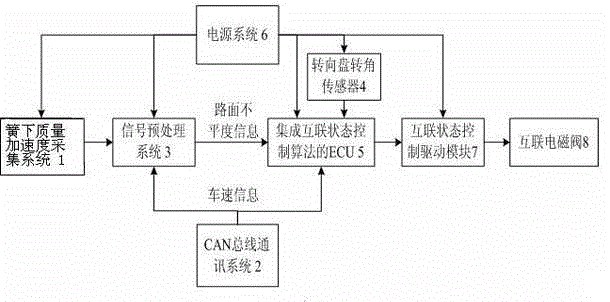
[0017] Such as figure 1 As shown, the horizontally interconnected air suspension interconnection state control system of the present invention consists of an unsprung mass acceleration acquisition system 1, a CAN bus communication system 2, an information preprocessing system 3, a steering wheel angle sensor 4, an ECU 5 integrated with an interconnection state control algorithm, and an interconnection State control drive module 7, interconnected solenoid valve 8 and power supply system 6.
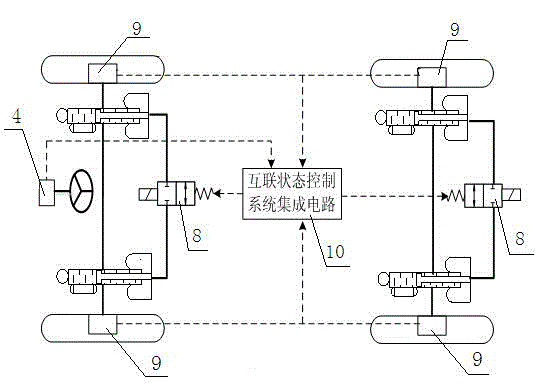
[0018] Combine figure 1 with figure 2 The unsprung mass acceleration acquisition system 1 is composed of several unsprung mass acceleration sensors 9 and sensor signal transmission lines, wherein the unsprung mass acceleration sensor 9 is arranged at each unsprung mass (such as a wheel hub). For example for figure 2 For the four-wheeled vehicle shown, four unsprung mass acceleration sensors 9 need to be arranged, and each unsprung mass acceleration sensor 9 transmits an acceleration signal to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More