

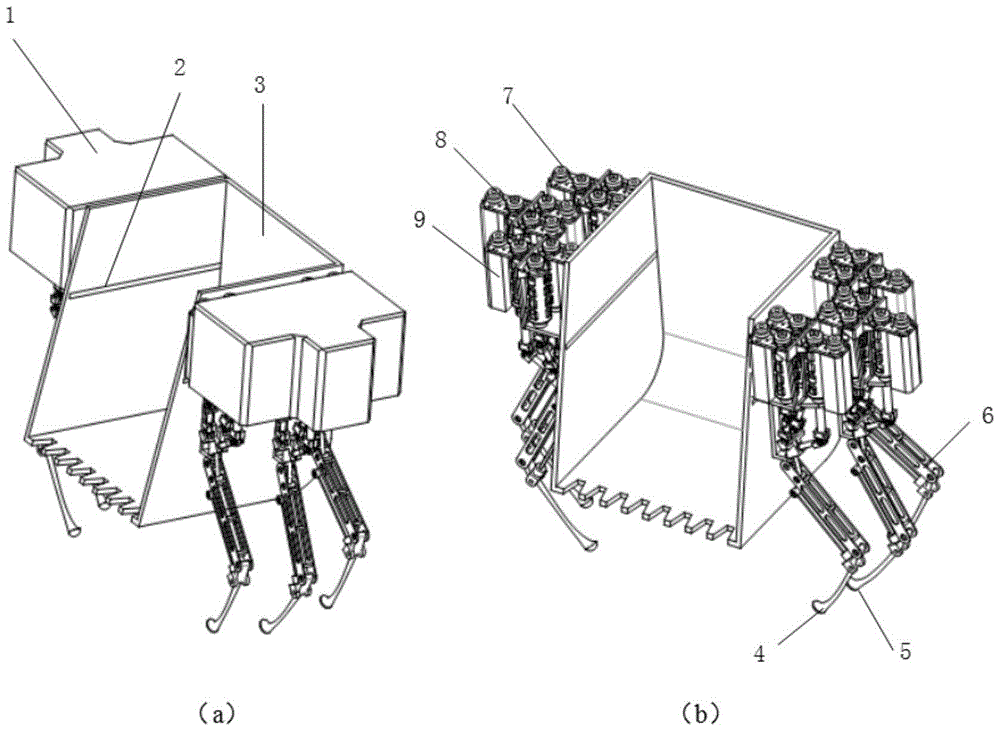
Eighteen degrees of freedom robot with bucket
A degree of freedom and robot technology, applied in the direction of motor vehicles, loading/unloading, transportation and packaging, etc., can solve problems such as complex structure and control, and achieve the effects of reducing driving costs, reducing moment of inertia, and facilitating protection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The embodiment of the present invention will be described in detail below: this embodiment is implemented on the premise of the technical solution of the present invention, and a detailed implementation manner and specific operation process are given. It should be pointed out that for those of ordinary skill in the art, without departing from the concept of the present invention, several modifications and improvements can be made, and these all fall within the protection scope of the present invention.
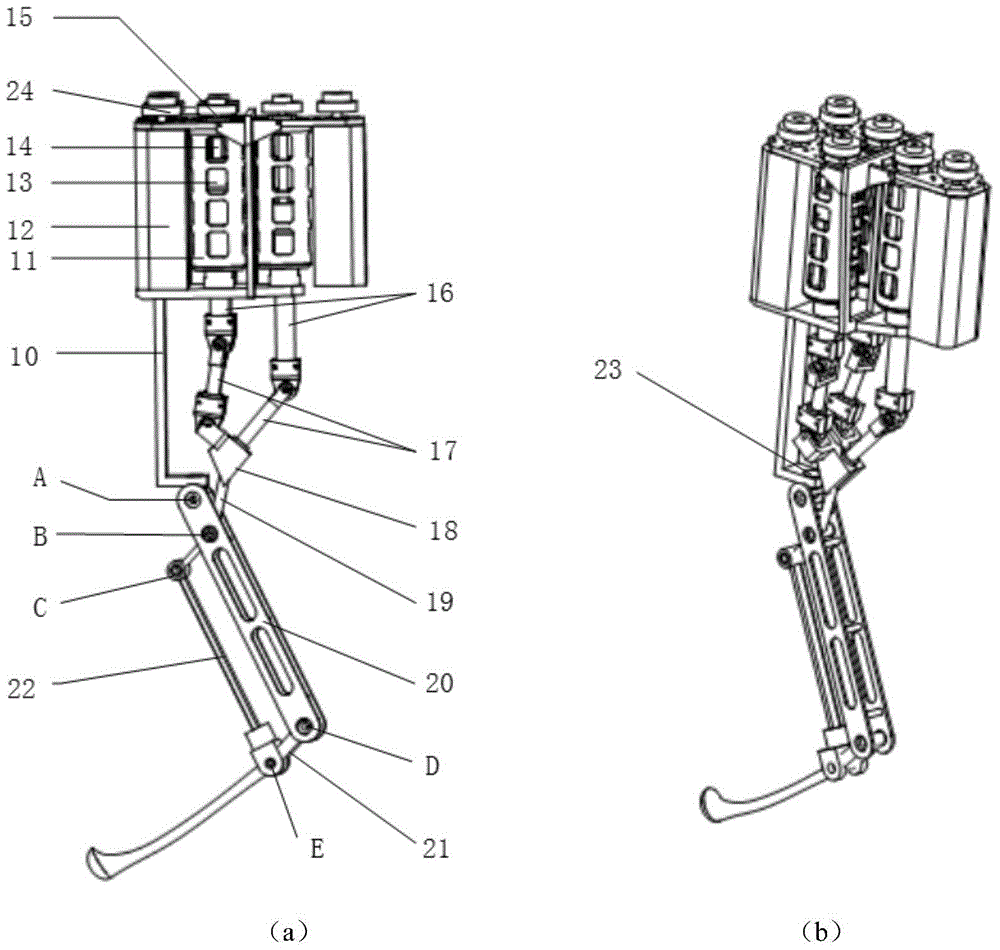
[0024] This embodiment provides a new type of eighteen-degree-of-freedom robot with a bucket, which includes a body and a plurality of mechanical legs that are evenly installed on both sides of the body in two groups; wherein each mechanical leg is individually controlled by a driving system Movement; each drive system adopts a three-branched chain parallel mechanism, the three-branched chain parallel mechanism is fixedly connected to the body, and is connected with a corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More