

Nine-rope driving robot device for simulating zero gravity and low gravity
A zero-gravity and low-gravity technology, applied in the field of nine-cable-driven robot devices, can solve problems such as multi-degree-of-freedom movement and simulation, and achieve good isotropy, high dynamic characteristics, and high system security.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
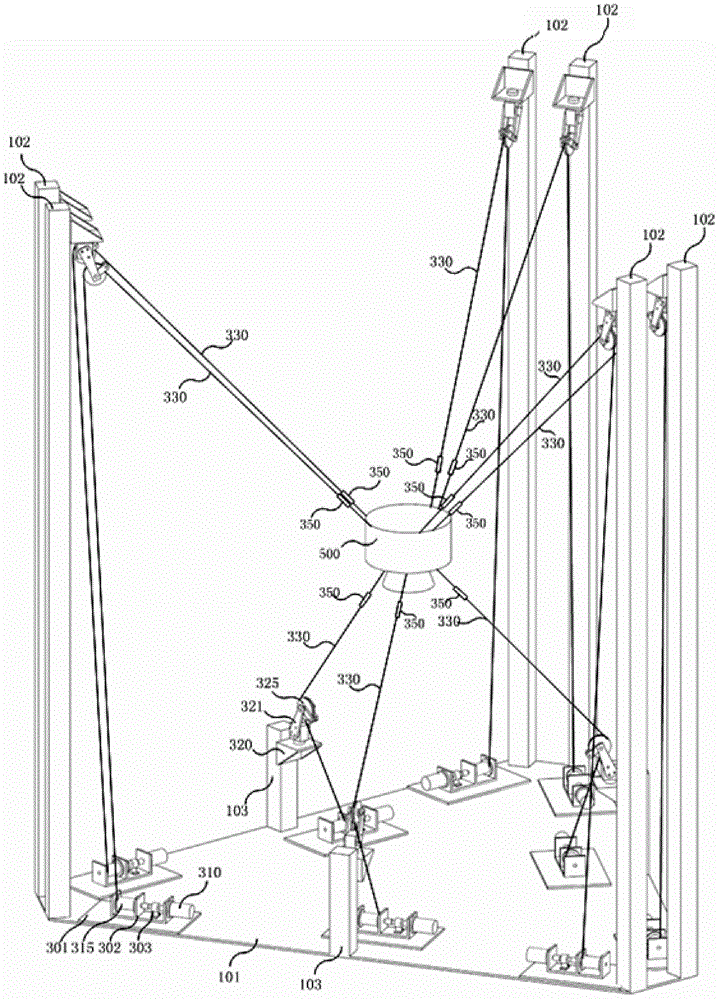
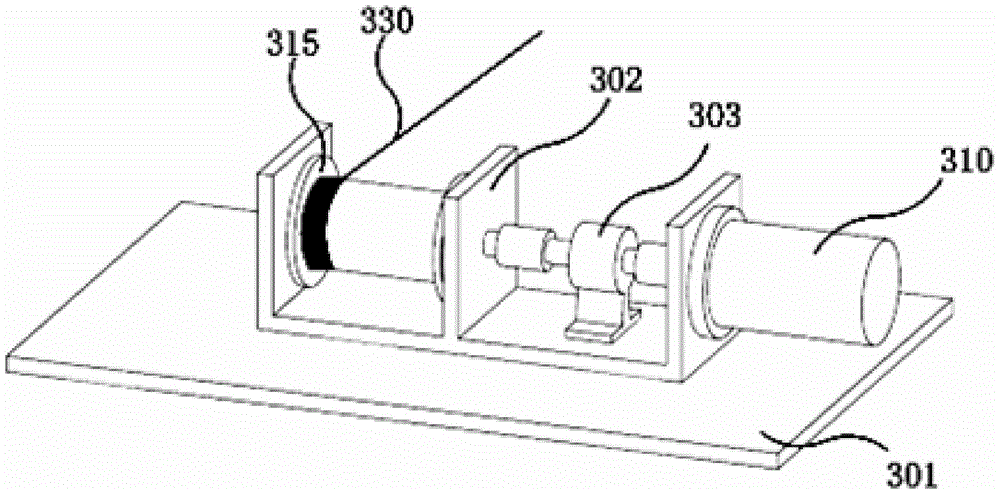
[0035] The invention relates to a nine-cable driven robot device for simulating zero gravity and low gravity such as figure 1 As shown, its specific implementation is as follows: the nine-rope-driven robot device for simulating zero-gravity and low-gravity environments consists of a basic frame, a rope 330, a rope drive unit, a rope guide, a simulated load platform 500, sensors, and a control system. , the foundation frame includes a foundation platform 101 and six high columns 102 and three low columns 103 installed on the foundation platform, and a set of rope drive units is installed at the root position accessories of each column, such as figure 2 As shown, the rope drive unit is composed of a mounting base 301, a mounting bracket 302, a motor 310, a roller 315 and related connectors, and there are nine sets in total; a set of rope guides i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More