

Reservoir culvert detection robot
A technology of robots and culvert pipes, which is applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems that are not suitable for the working environment of reservoir culvert pipes, difficult to adjust the posture of pipes, and large mechanical structure size, etc., to achieve light weight, compact structure, and changeable powerful effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
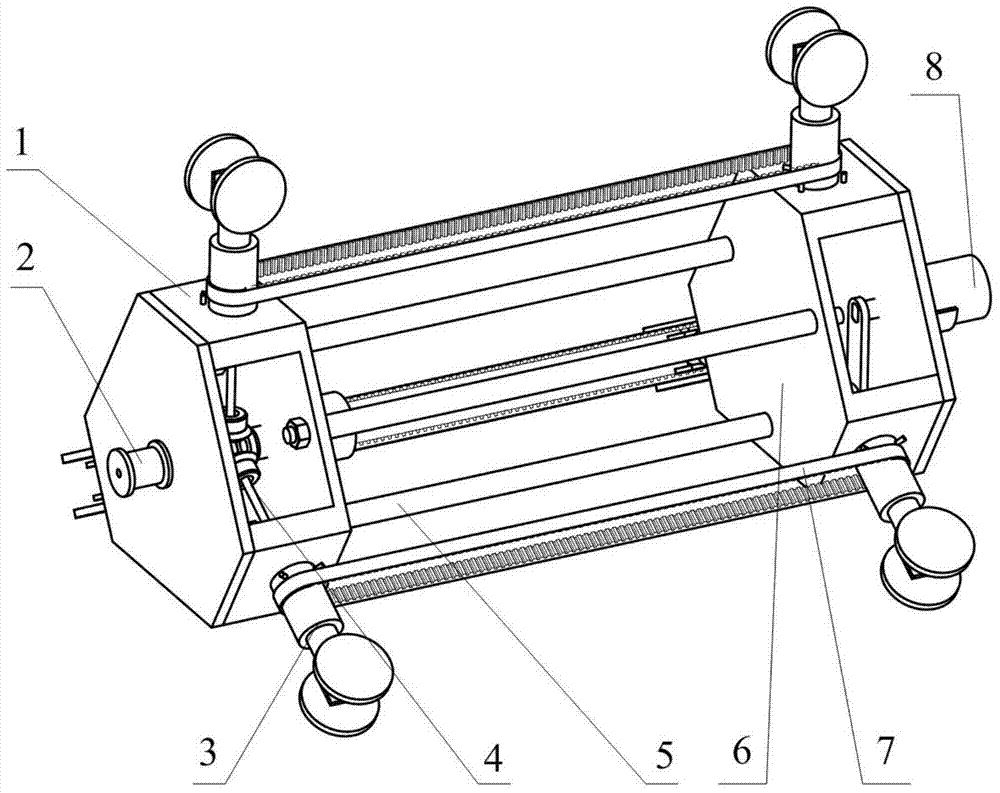
[0037] Such as figure 1 As shown, the reservoir culvert inspection robot includes a driving wheel set 1, a steering system 2, a connecting mechanism 5, a driven wheel set 6, a synchronous belt 7 and a control system 8; the driving wheel set 1 and the driven wheel set 6 are connected through the connecting mechanism 5, The steering system 2 controls the steering of the drive wheel set 1 .
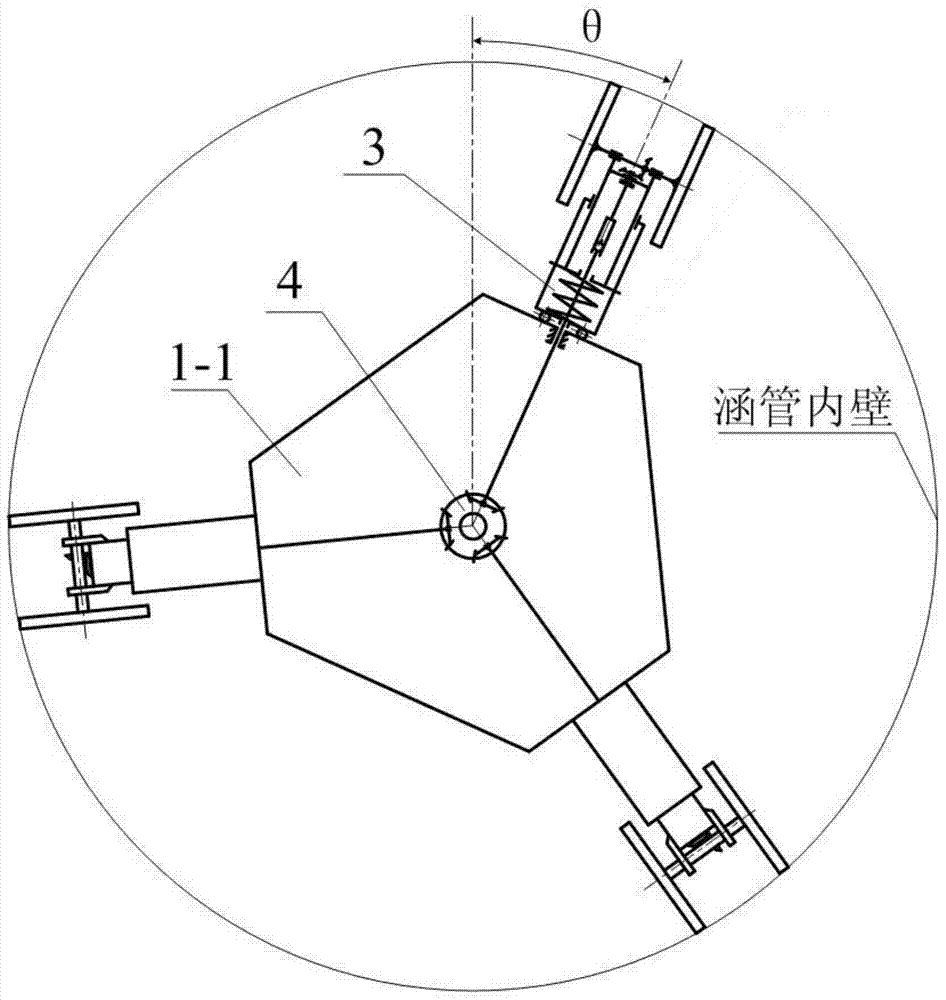
[0038] Such asfigure 1 and 2 As shown, the drive wheel set 1 includes a first main mounting plate 1-1, a wheel-leg mechanism 3 and a transfer system 4; the three wheel-leg mechanisms 3 are uniformly arranged on the side wall of the first main mounting plate 1-1 along the circumference Above; the transfer system 4 is arranged at the center of the first main mounting plate 1-1 to drive the three wheel-leg mechanisms 3 .
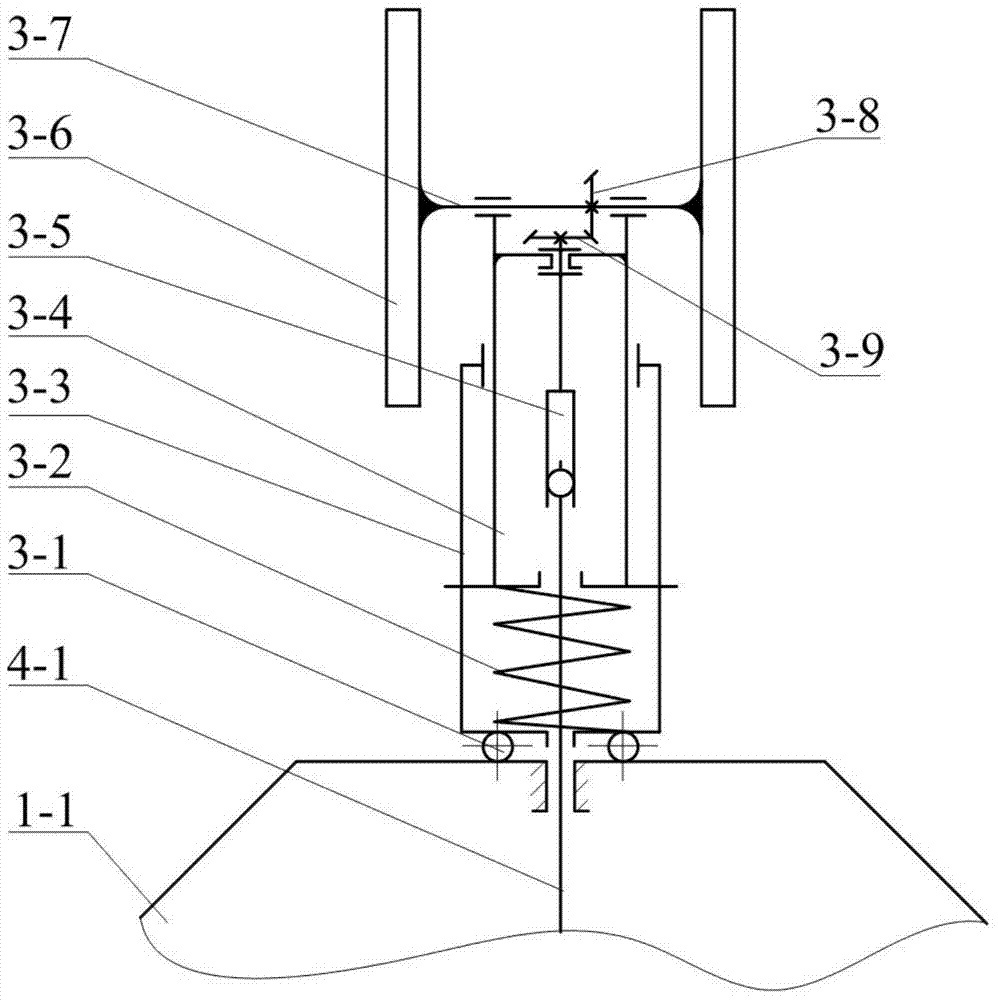
[0039] Such as figure 2 and 3 As shown, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More