

Disturbance moment identification method for satellite attitude control
A satellite attitude control and interference torque technology, applied in attitude control, adaptive control, general control system, etc., can solve the problem of inability to separate measurement noise and interference torque, and achieve the effect of no time delay and good noise effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
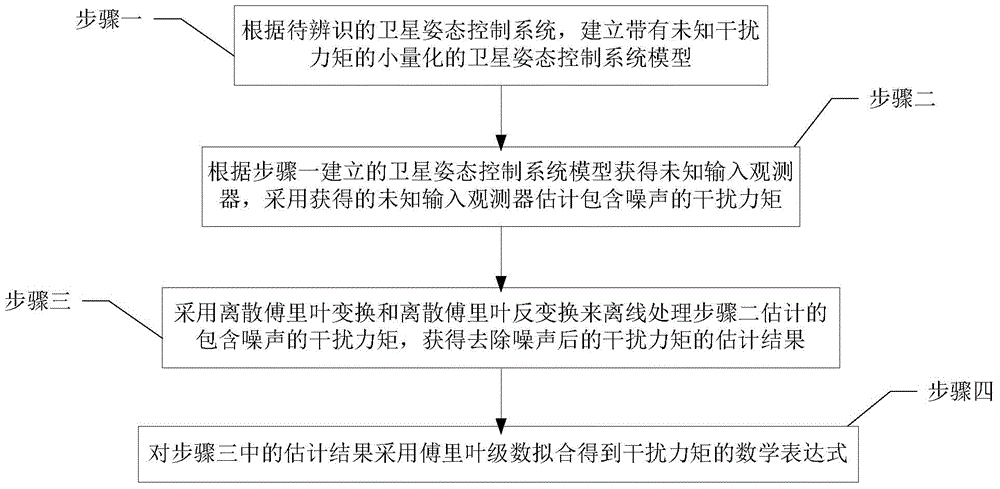
[0051] Specific implementation mode one: combine figure 1 Describe this embodiment, the interference moment identification method applicable to satellite attitude control described in this embodiment, the method includes the following steps:
[0052] Step 1. According to the satellite attitude control system to be identified, a small quantized satellite attitude control system model with an unknown disturbance moment is established;
[0053] Step 2. Obtain an unknown input observer according to the satellite attitude control system model established in step 1, and use the obtained unknown input observer to estimate the disturbance torque including noise;
[0054] Step 3, using discrete Fourier transform and inverse discrete Fourier transform to process the noise-containing disturbance torque estimated in step 2 off-line, and obtain the estimated result of the disturbance torque after noise removal;
[0055] Step 4, using Fourier series fitting to the estimation result in step...
specific Embodiment approach 2
[0056]Specific embodiment two: This embodiment is a further limitation of the disturbance moment identification method suitable for satellite attitude control described in specific embodiment one, the specific process of the step one:
[0057] Select Satellite Euler Angles As attitude parameters, where, is the roll angle, θ is the pitch angle, and ψ is the yaw angle, according to the sequence of 3-1-2, that is, first rotate the ψ angle around the z axis, and then rotate around the x axis Angle, and finally rotate the θ angle around the y-axis to get the kinematic equation of the satellite:
[0058]
[0059] In the formula, the rotational angular velocity ω=[ω x ω y ω z ] T ;
[0060] The attitude dynamic equation of the satellite is:
[0061]
[0062] where u c =[u 1 u 2 u 3 ] T is the control torque on the star, d=[d 1 d 2 d 3 ] T Indicates the disturbance torque.
[0063] The attitude dynamic equation can be rewritten into the following form: ...
specific Embodiment approach 3
[0081] Specific embodiment three: this embodiment is a further limitation of the disturbance moment identification method suitable for satellite attitude control described in specific embodiment one, and the step two includes the following steps:
[0082] Step 21. Discretize the model in step 1. From formula (14), we can know that B u =B d , so it can be set that B in formula (16) u =B d =B, taking the sampling time △t, the discrete state space expression of the system with unknown disturbance is obtained as:
[0083]
[0084] Step 22. In order to calculate the unknown interference input, the conditions must be met:
[0085] rank(CB)=rank(B)=k d (18)
[0086] In formula (17), since C is a unit matrix, it can be seen that CB=B, which satisfies formula (18).
[0087] Step two and three, obtaining an unknown input state observer. From formula (17), we can get:
[0088] y(k+1)-CAx(k)-CBu(k)=CBd(k)+Cw k +v k+1 (19)
[0089] Under the conditions in step 22, there ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More