

Test device for 6-DOF gait simulation
A test device and a technology of degrees of freedom, applied in the field of motion simulation, can solve problems such as the large size of the Stewart platform structure, incomplete control of the 6 degrees of freedom of the tibia, and inconsistent active and passive relationships, etc., to achieve a compact and small structure The effect of size and accuracy improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
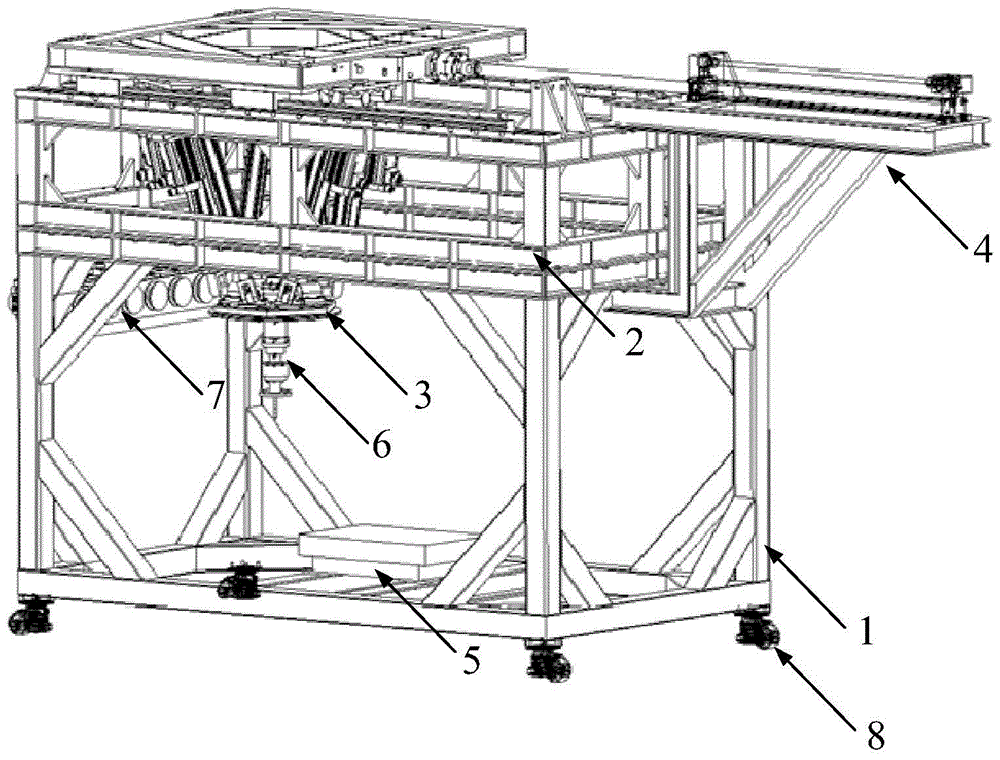
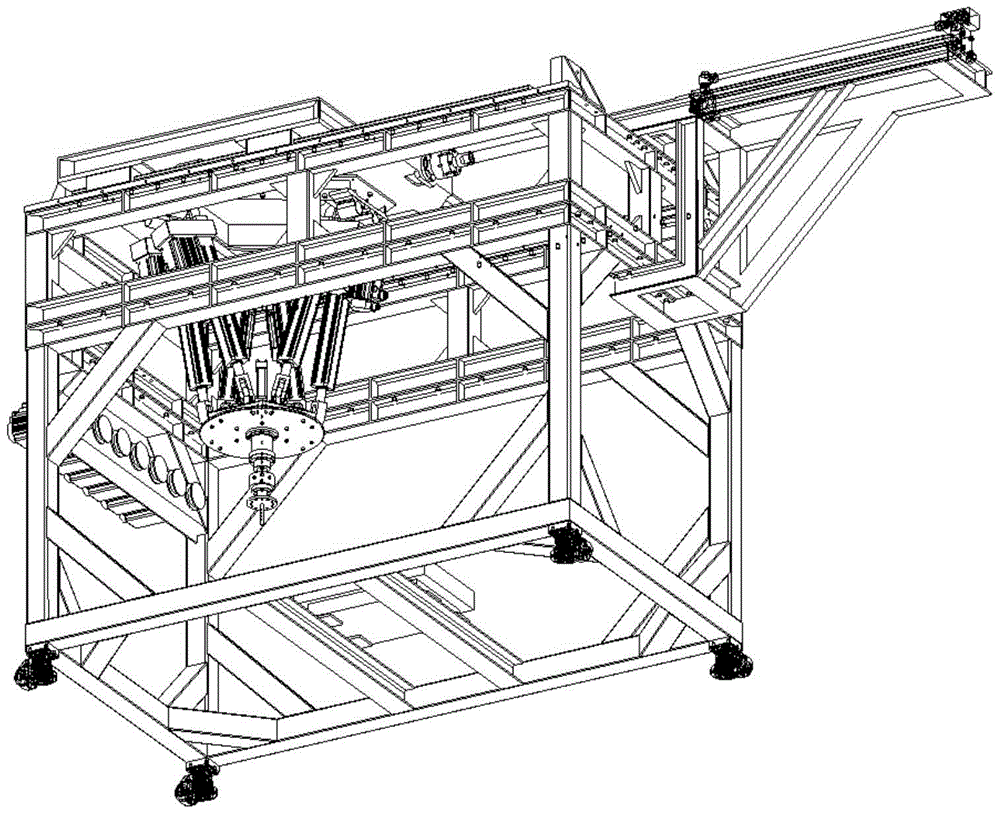
[0027] Such as figure 1 and figure 2 As shown, this embodiment includes: lower frame 1, upper frame 2, parallel mechanism 3, base driving part 4, force measuring plate 5, ankle loading part 6 for clamping tibia, tendon stretching part 7 and horizontal adjustable Adjustable casters 8, wherein: the bottom of the upper frame 2 is connected to the top of the lower frame 1, the horizontally adjustable casters 8 are installed on the bottom of the lower frame 1, the base driving part 4 and the force measuring plate 5 are respectively arranged on the upper frame 2 and the bottom of the lower frame 1, the top of the parallel mechanism 3 is connected with the base driving part 4, and the bottom is connected with the ankle-holding tibial loading part 6, and the ankle-holding tibial loading part 6 is set on the force measuring plate 5 Above, the side of the lower frame 1 is provided with a tendon stretching part 7, and the base driving part 4 and the parallel mechanism 3 respectively co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More