Real-scenery navigation method and navigation equipment
The technology of a navigation device and a navigation method, which is applied in the field of navigation, can solve problems such as incomplete navigation prompts, and achieve the effect of avoiding incomplete navigation prompts and accurate driving paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
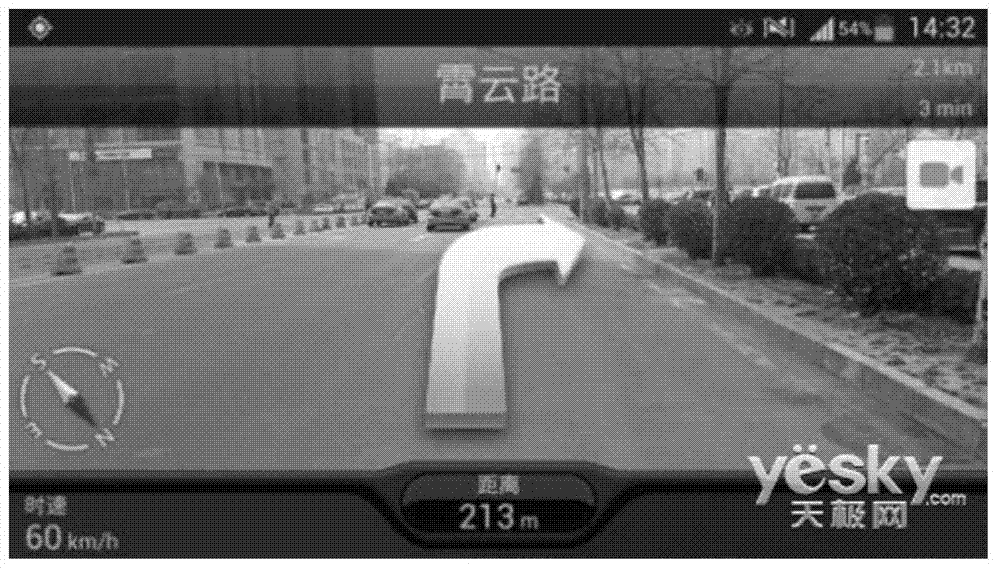
[0049] When the user travels by driving a vehicle, he can conduct road navigation through a device equipped with navigation software (hereinafter referred to as the navigation device), that is, the navigation device plans the navigation path from the starting location to the destination location and guides the user to the destination location. Among them, the navigation path It is composed of continuous navigation sections, and the navigation section is composed of continuous location points. When the user selects the real-scene navigation function, what is displayed on the screen of the navigation device is no longer an electronic map interface, but a real-scene image (street view image) collected in real time by the camera of the navigation device. The real-scene navigation method provided by the embodiment of the present invention will be described in detail below with reference to the accompanying drawings.
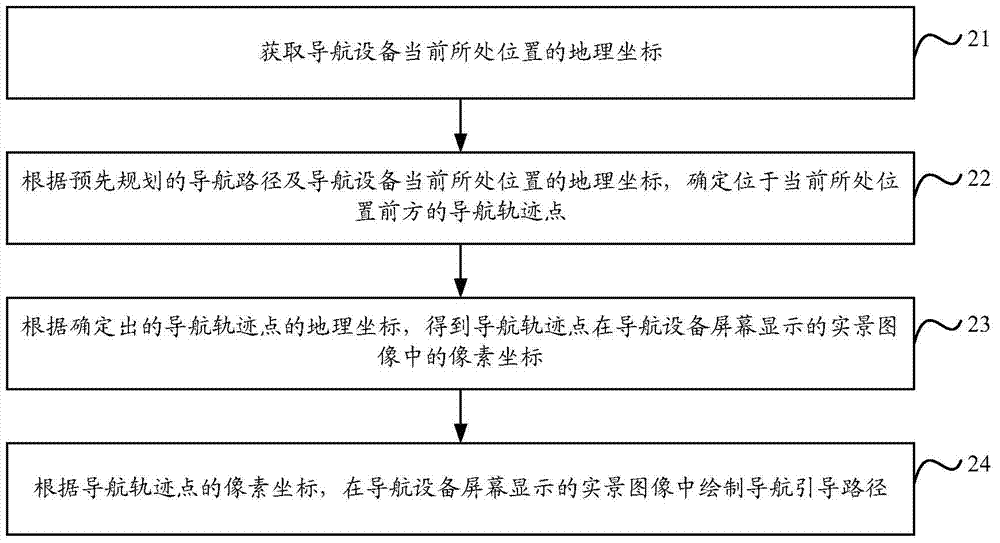
[0050] Such as figure 2 As shown, it is a flow chart of the re...
Embodiment 2
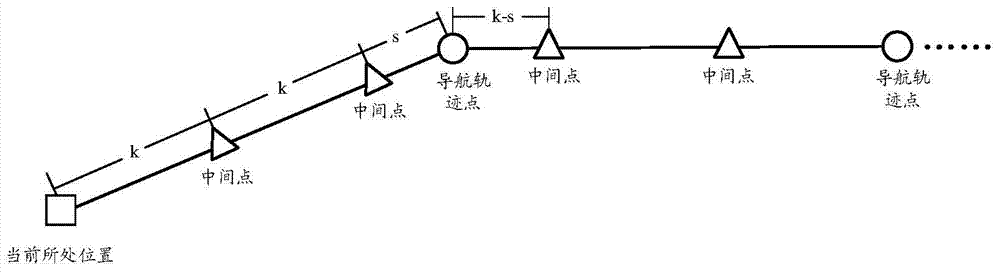
[0065] Embodiment 2 of the present invention proposes that when the navigation device determines each navigation track point, it can first obtain the geographical location in front of the current location of the navigation device and the location of the current location of the navigation device from among the location points included in the pre-planned navigation route. Each location point with matching coordinates, wherein, the navigation device can, but not limited to, obtain each location point that is located in front of the current location of the navigation device and matches the geographic coordinates of the current location in the following two ways, respectively, as follows introduce:
[0066] In the first acquisition method, the navigation device determines the position points that are located in front of the current position and whose distance from the current position of the navigation device is not greater than the set distance among the position points included in...
Embodiment 3
[0075] Such as Figure 4 As shown, it is a schematic flow diagram of converting the geographic coordinates of navigation track points into pixel coordinates in real-scene images by the navigation device proposed in Embodiment 3 of the present invention. The specific processing flow is as follows:
[0076] Step 41 , according to the geographic coordinates of the current location of the navigation device and the geographic coordinates of the navigation track point, the geographic coordinates of the current location and the geographic coordinates of the navigation track point are converted into ground two-dimensional coordinates.
[0077]Among them, the navigation device can be used, but not limited to, through existing algorithms that transform from geodetic coordinates to map projection coordinates (for example, Mercator projection algorithm, Gauss-Krüger projection algorithm, general Mochato projection algorithm, Lambert projection algorithm) , Albers projection algorithm, etc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



