

Fuzzy control system and realization method thereof for medical robot
A technology of fuzzy control system and microcontroller, applied in the field of control system, can solve the problems of few safety protection measures, unable to clinical application, difficult to guarantee reliability, etc., and achieve the effect of reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solution of the present invention will be described in detail below with reference to the drawings and specific embodiments.
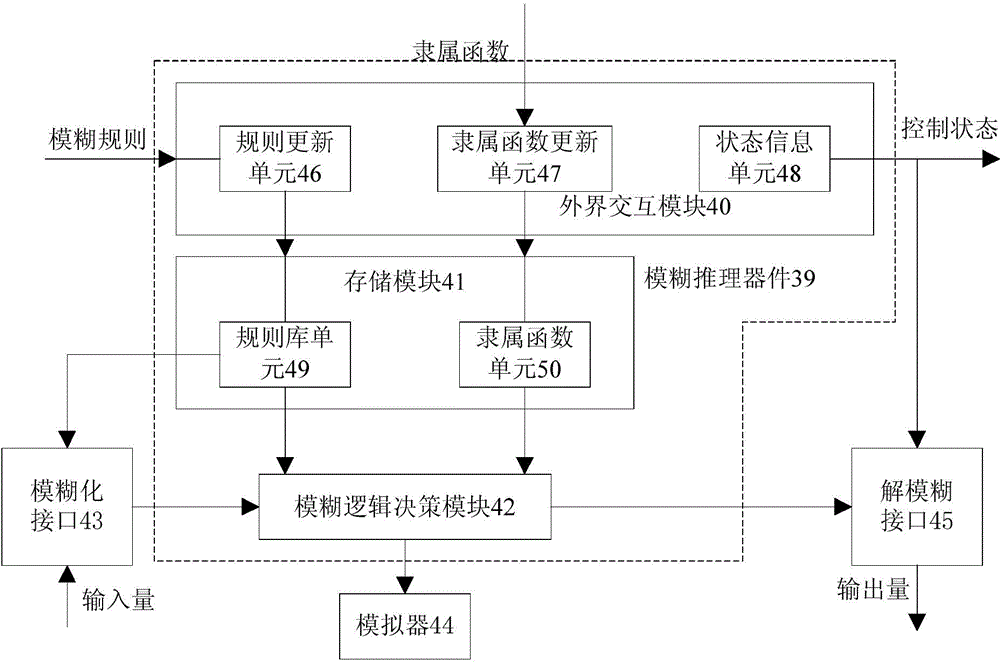
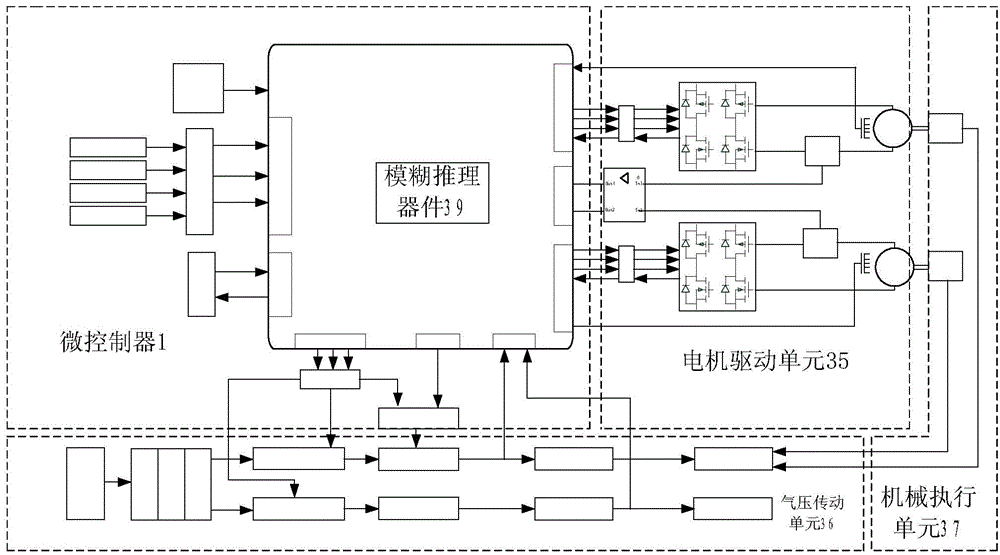
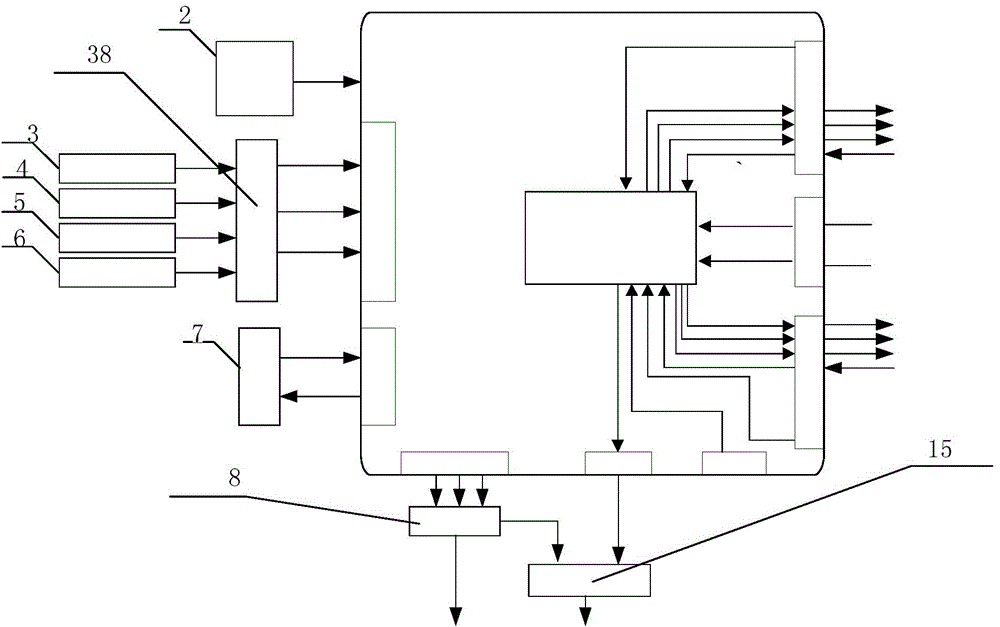
[0029] A kind of fuzzy control system for medical robot provided by the present invention, such as figure 1 and figure 2 As shown, it includes a fuzzy inference device 39 for being arranged on the microcontroller 1, and the fuzzy inference device 39 includes an external interaction module 40 for inputting fuzzy control rules, and the external interaction module 40 communicates with a user In the storage module 41 communication connection of storage fuzzy model, described storage module 41 is connected with a fuzzy logic decision-making module 42 communication connection for establishing fuzzy model, and described storage module 41, described fuzzy logic decision-making module 42 are all connected with one for The fuzzification interface 43 of the input parameter is connected in communication, and the fuzzy logic decision module 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More