

Manipulator tongs capable of striding across fixed obstacle
A manipulator and hand grasping technology, applied in the field of manipulator grasping, can solve problems such as grasping failure and complex structure, and achieve the effect of simple structure, high comprehensive benefit and improved benefit
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific embodiments of the present invention are given below in conjunction with the accompanying drawings, but the present invention is not limited to the following embodiments. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that all the drawings are in very simplified form and use imprecise ratios, which are only used for the purpose of conveniently and clearly assisting in describing the embodiments of the present invention.
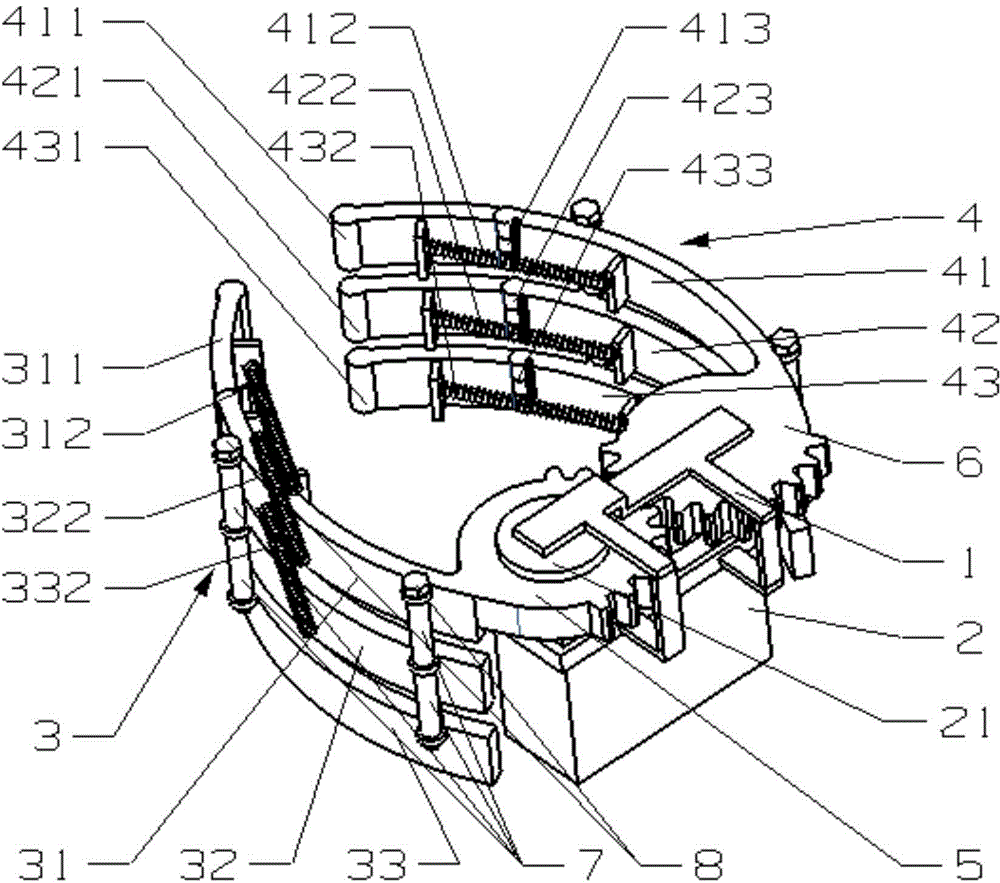
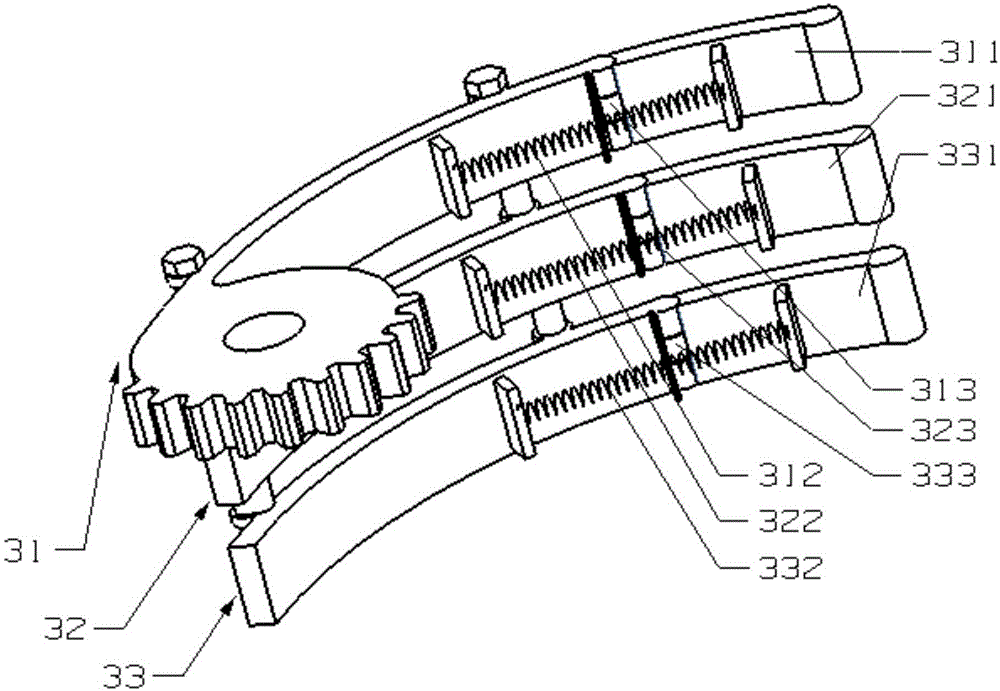
[0024] Please refer to figure 1 and figure 2 , figure 1 Shown is a schematic diagram of the structure of the manipulator grasping across the fixed obstacles in a preferred embodiment of the present invention, figure 2 Shown is a schematic diagram of the left-hand grasping structure of the robotic arm capable of crossing fixed obstacles in a preferred embodiment of the present invention. The present invention proposes a mechanical gripper capable of cross...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More