

Dual-arm robot movement control method under non-linear condition of driver
A robot and nonlinear technology, applied in the field of robotics, can solve problems that affect the stability of the dual-arm robot system, and the robot is difficult to accurately control the position and damage of objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the objectives, technical solutions and advantages of the present invention more clear, the examples of the present invention will be described in detail below in combination with specific examples and with reference to the accompanying drawings.
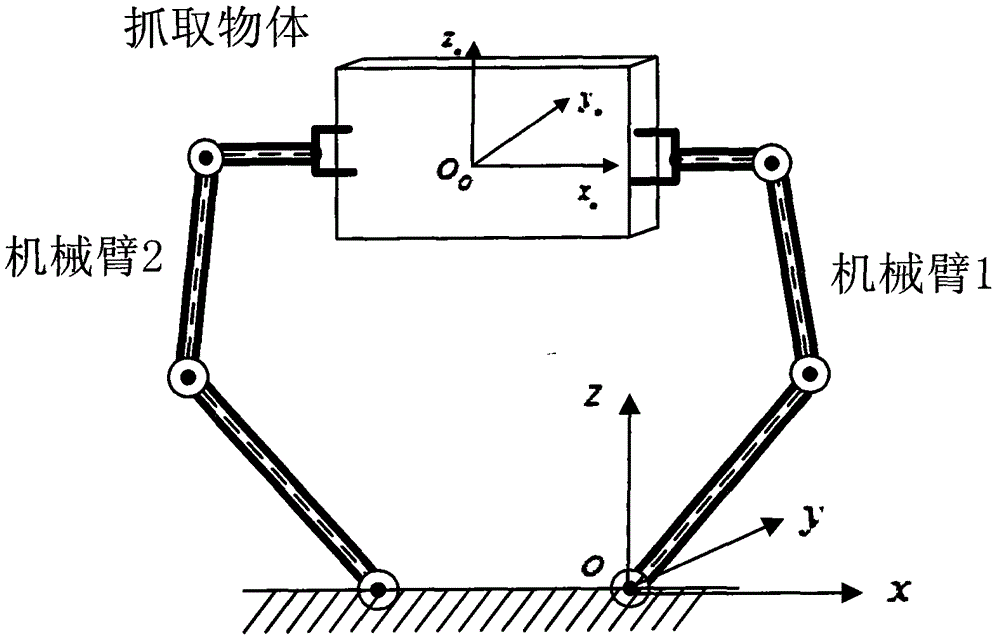
[0032] Such as figure 2 Shown is a schematic diagram of a dual-arm robot grabbing objects. The dual-arm robot has two left and right mechanical arms, the two mechanical arms have the same structure, and each mechanical arm has 3 degrees of freedom. There is a grasping device at the end of the robotic arm, which is connected to the object, and can operate the object on a plane, and control the coordinates and posture of the object. The object is a rigid object with uniform density. In this example, it is assumed that the object and the gripping device of the robotic arm are closely connected and do not move relative to each other. For a dual-arm robot, the base of the robot arm 1 is the base coordinate of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More