Foreground detection method and system
A technology of foreground detection and foreground images, which is applied in image data processing, instruments, calculations, etc., can solve problems such as inability to eliminate false alarms, limited computing power of front-end camera processors, and weak contrast
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
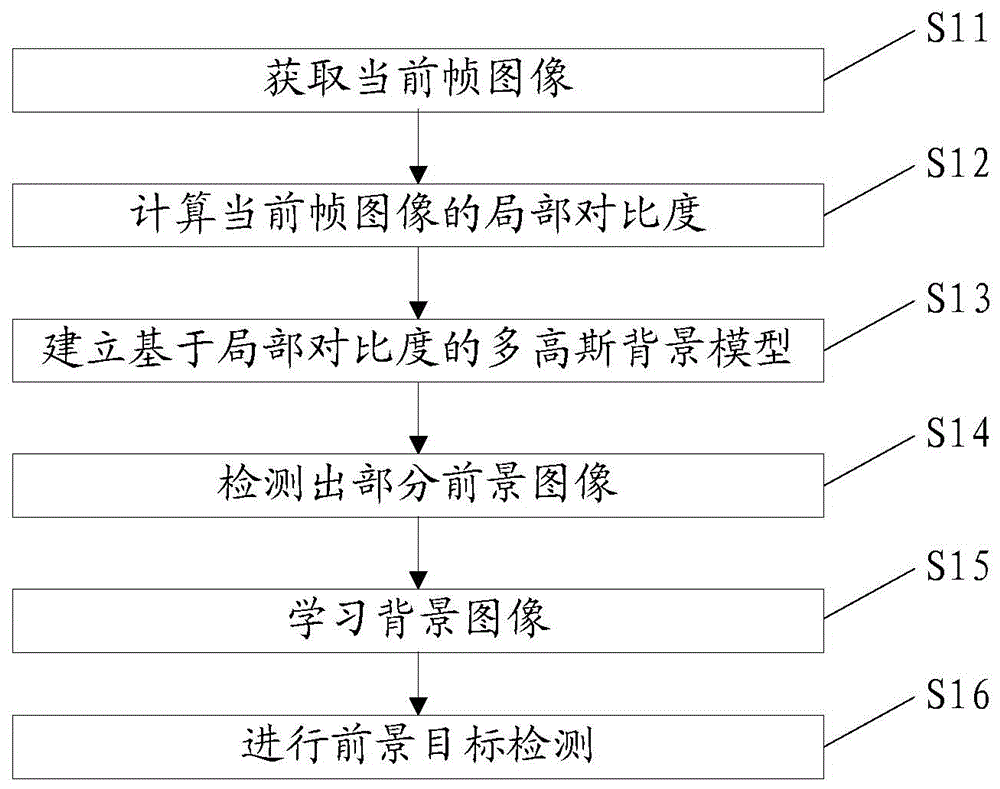
[0080] Such as figure 1 As shown, this embodiment provides a foreground detection method, which specifically includes the following steps:
[0081] S11: Acquiring the current frame image.
[0082] S12: Calculate the local contrast of the current frame image. Specifically, the local contrast of the current frame image can be calculated in the following ways:
[0083] First, divide the current frame image into several m*n pixel blocks, where m and n are positive integers greater than 0;
[0084] Then, count the gray mean and gray variance of each pixel block;
[0085] Finally, the local contrast of each pixel block is obtained, and the local contrast is the quotient obtained by dividing the gray level variance of each pixel block by the gray level mean value.
[0086] In addition to using the above method to calculate the local contrast, the local contrast may also be calculated by other methods in the prior art.
[0087] S13: Referring to the relevant information of the pr...
Embodiment 2
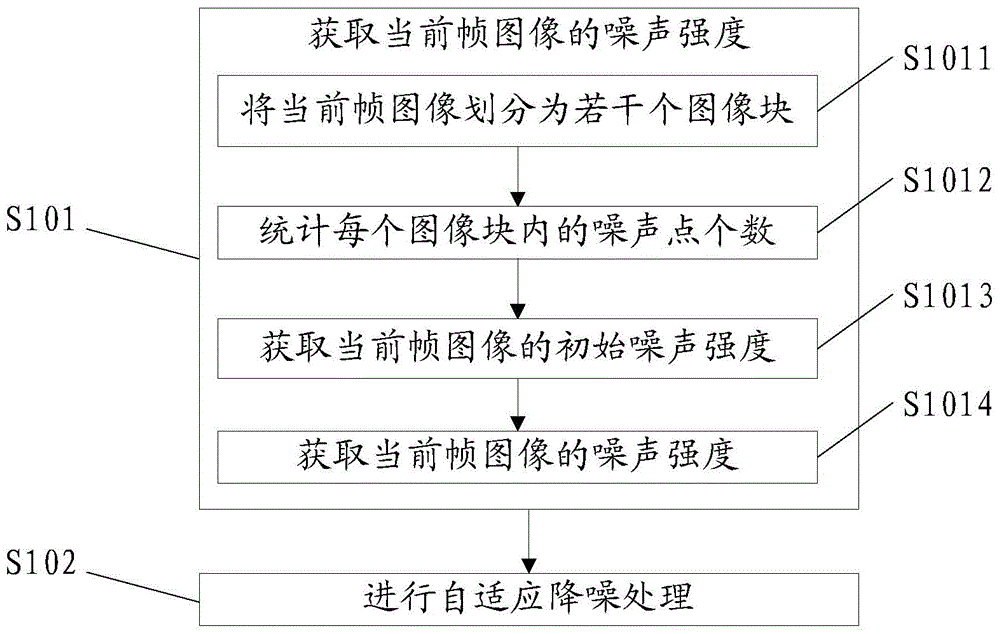
[0102] Such as figure 2 As shown, this embodiment provides another foreground detection method. Compared with the above-mentioned embodiment 1, after the step of acquiring the current frame image and before calculating the local contrast of the current frame image, it also includes adaptive The process of noise processing to eliminate the impact of noise on foreground detection during imaging, the specific steps are as follows:
[0103] S101: Obtain the noise intensity of the current frame image;
[0104] S102: When the noise intensity is greater than the preset threshold, perform noise reduction processing on the current frame image. Specifically, a low-pass filter may be used for noise reduction processing, and an average filtering algorithm may be further selected for noise reduction.
[0105] In the foreground detection method provided in this embodiment, when the noise intensity of the current frame image is strong, that is, greater than a preset threshold, noise reduct...
Embodiment 3
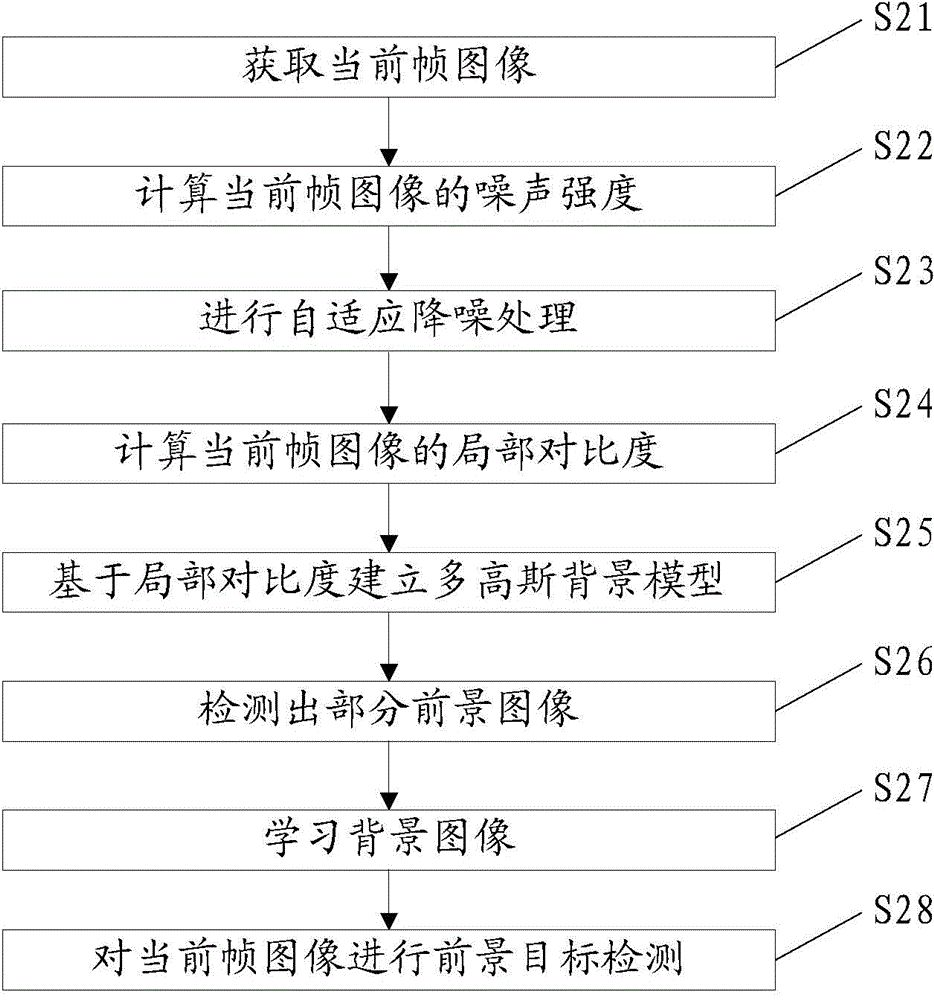
[0120] Such as image 3 As shown, the present embodiment provides a foreground detection method, comprising the following steps:
[0121] S21: Acquiring the current frame image. Because the camera detects the foreground target in real time, it will acquire each frame of image collected in real time, and perform foreground detection on each frame of image to realize real-time tracking of the target.
[0122] S22: Calculate the noise intensity of the current frame image. Every time a frame of video image is acquired, the noise intensity of the frame image is calculated. The specific calculation process is as follows:
[0123] First, calculate the absolute value of the grayscale difference between the frame image and the previous frame image at each pixel point, which is denoted as D(x,y). If T0≤D(x,y)≤T1, then the pixel point (x ,y) is a noise point, otherwise it is not a noise point, wherein T0 and T1 are preset thresholds, T0<T1, in this embodiment, 8 and 16 are taken resp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com