

A lower limb rehabilitation training robot for long-term bedridden patients
A technology of rehabilitation training and robotics, applied in the direction of passive exercise equipment, physical therapy, etc., can solve the problems of failing to achieve the expected rehabilitation effect, difficulty in consumption by ordinary families, and high cost, so as to avoid high cost and prevent waste.” Atrophy and recovery of limb function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
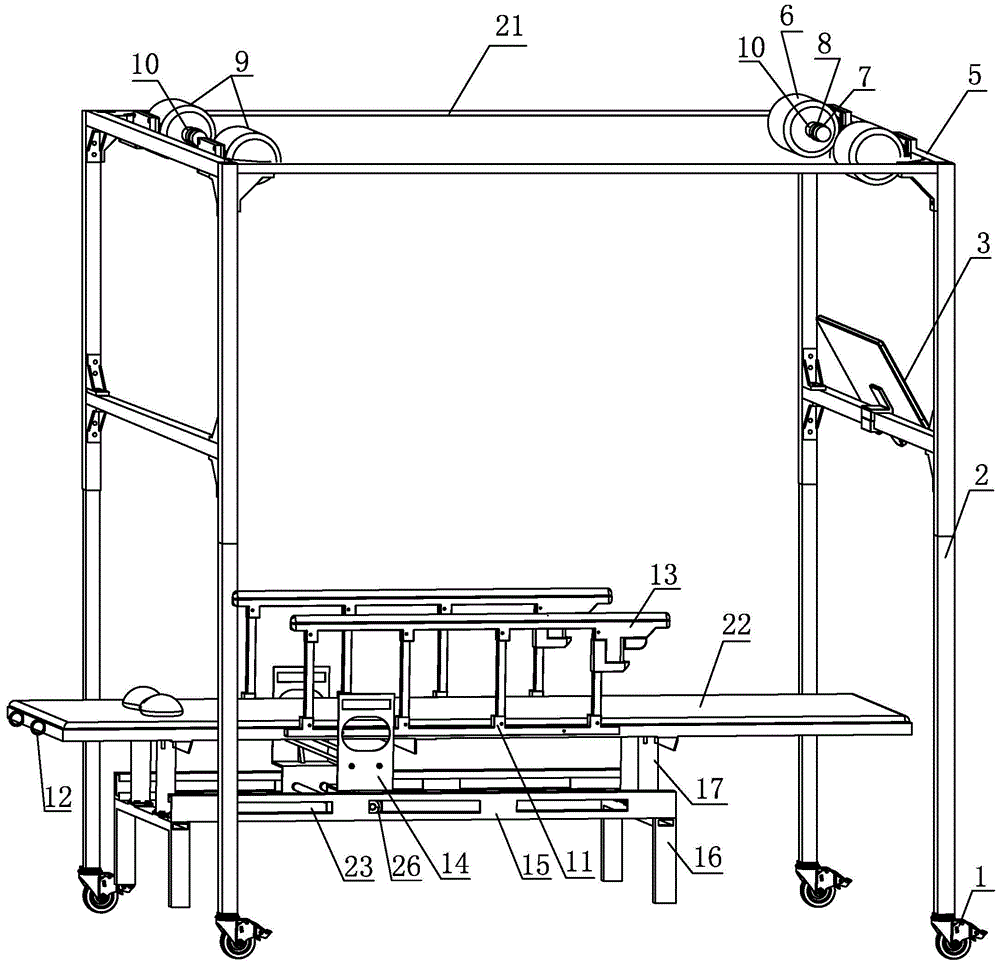
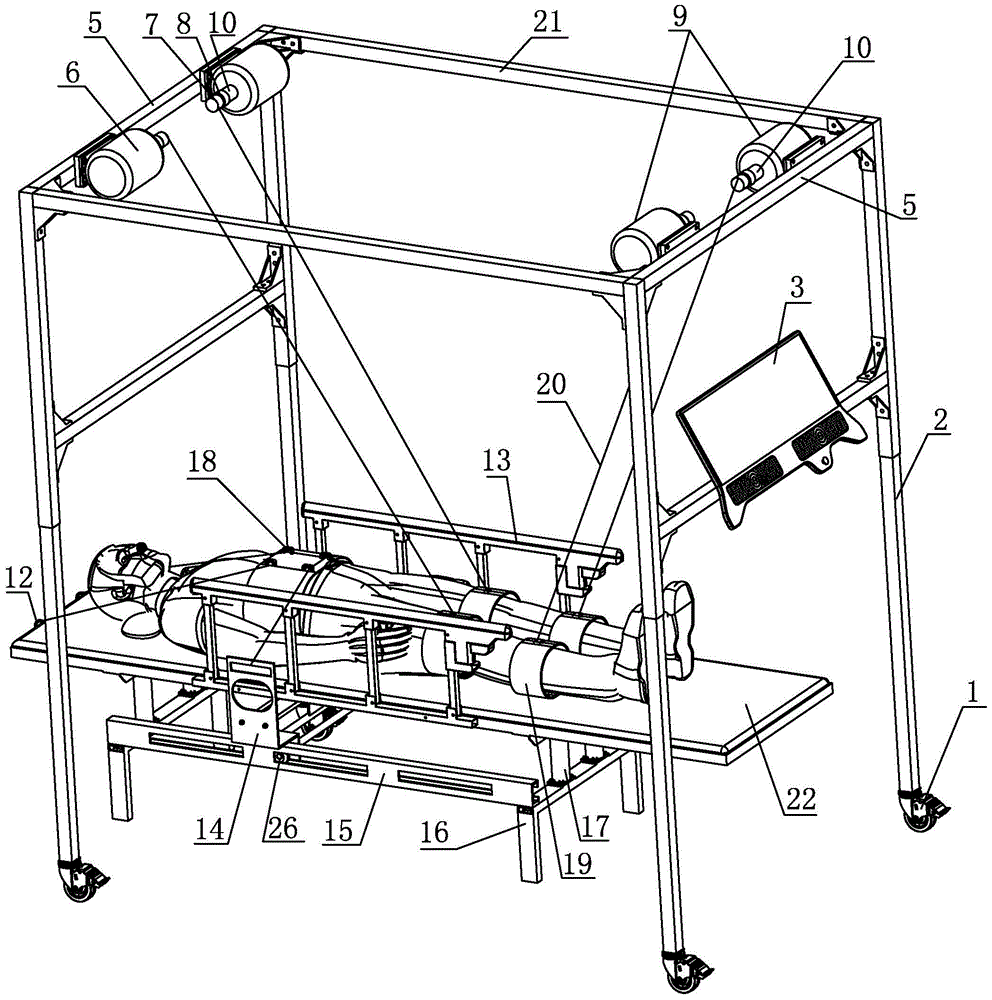
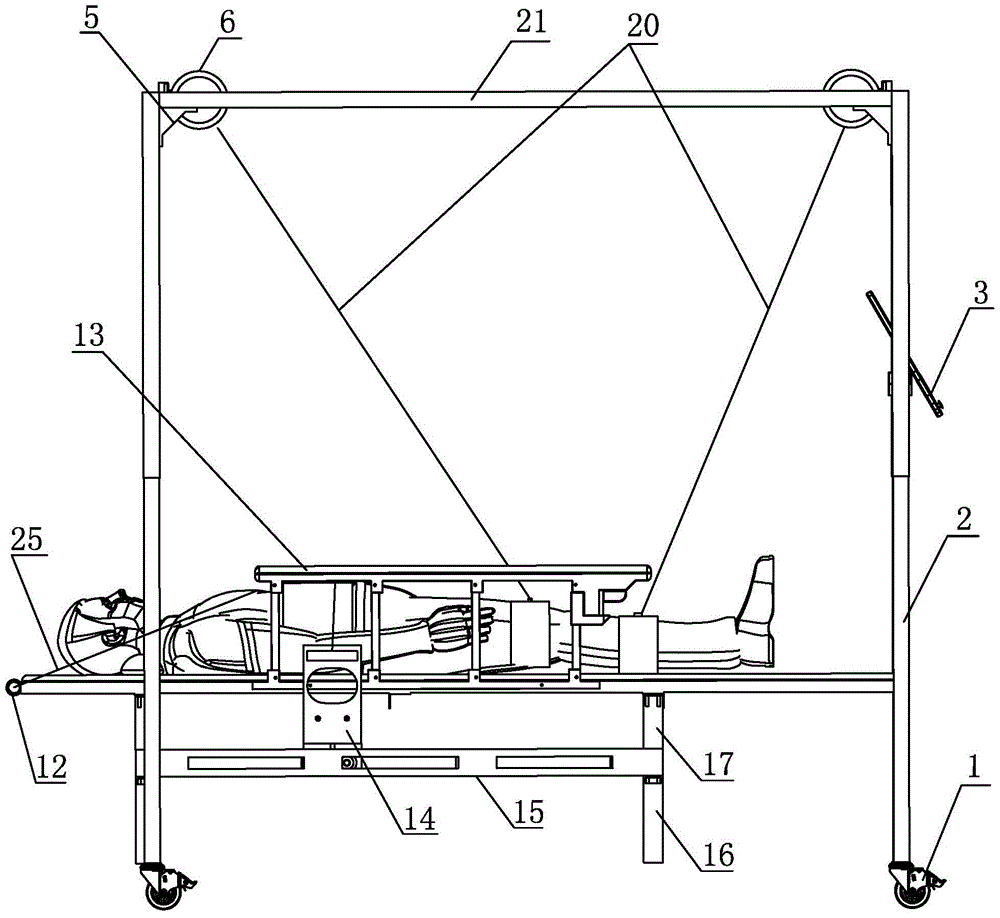
[0015] Specific implementation mode one: combine Figure 1-Figure 6 To illustrate, a lower limb rehabilitation training robot for long-term bedridden patients in this embodiment includes a support frame, a bound medical bed 11, a pulling device and a control system;
[0016] The support frame includes a frame 21 and four casters 1; the control system includes a touch screen 3; the frame 21 can be stretched vertically, and the four casters 1 are arranged in a rectangular array at the lower end of the frame 21;
[0017] The pulling device includes four leg rehabilitation belts 19 and four sets of pulling mechanisms 9, and the four sets of pulling mechanisms 9 are arranged in a rectangular array on the upper end of the frame 21; each set of pulling mechanisms includes a DC motor 6, a reducer 10, The torque sensor 8, the winding shaft 7 and the pulling flexible cable 20; the axial horizontal arrangement of the DC motor 6, the DC motor 6 is fixed on the frame, the output end of the...
specific Embodiment approach 2
[0020] Specific implementation mode two: combination figure 1 and Figure 6 It is explained that the DC motor 6 of each pulling mechanism A in this embodiment is a brushless DC motor. With such setting, the starting torque is large, the weight is light, the output is large, the efficiency is high, and the reliability is good. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0021] Specific implementation mode three: combination figure 1 and Figure 6 Explain that each guardrail 13 in this embodiment is a foldable guardrail. With such arrangement, it is convenient for patients to get on and off the medical bed, and it is convenient to use. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More