

Functional muscle electrical stimulation-driven exoskeleton walking aiding system
A kind of muscle electricity, functional technology, applied in the direction of equipment to help people move, electrotherapy, inertial sensors, etc., can solve the problem that cannot conform to the human body's own musculoskeletal movement mode, the energy consumption of power driving components, and the volume and weight cannot fully meet the needs of use. It can avoid muscle fatigue and even damage, avoid muscle disuse atrophy, and reduce weight and power consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] An exoskeleton walking aid system driven by functional muscle electrical stimulation of the present invention will be described in detail below in conjunction with the embodiments and drawings.
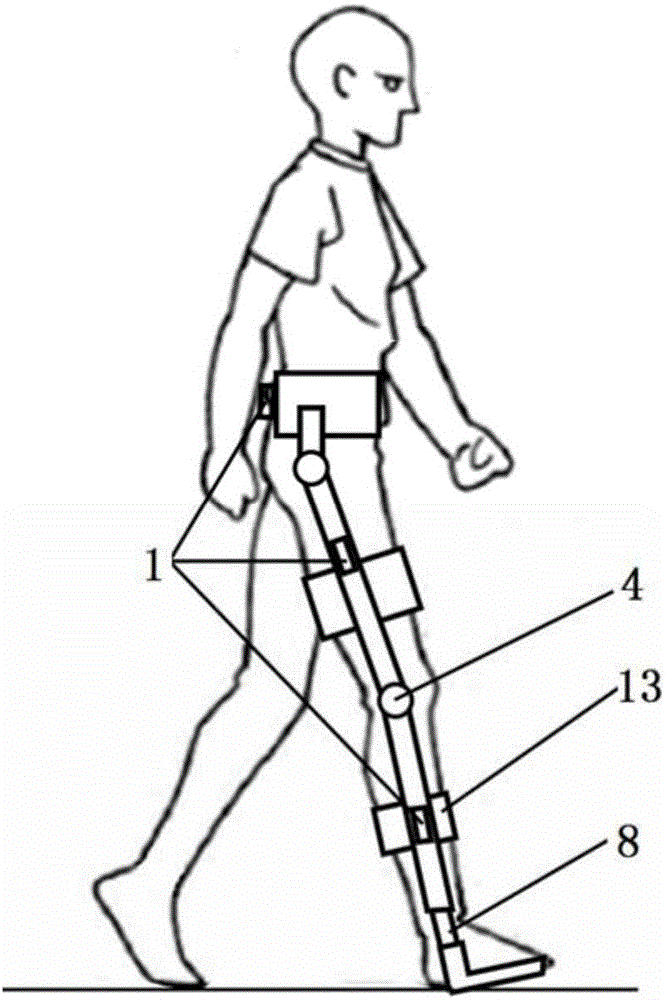
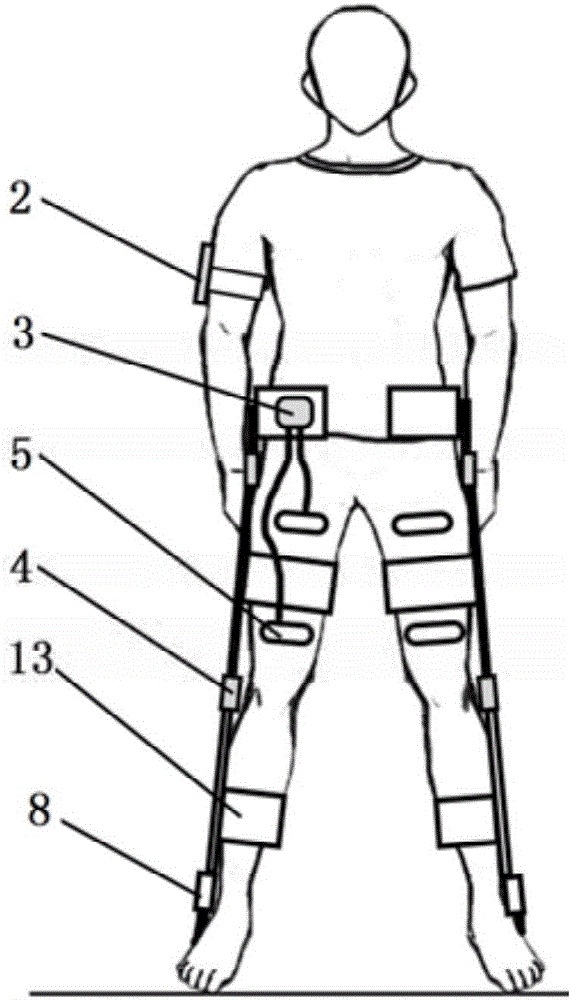
[0057] An exoskeleton walking aid system driven by functional muscle electrical stimulation of the present invention is a walking aid exoskeleton system without motor drive, natural gait, light weight and strong battery life. Use the exoskeleton gait measurement unit to detect the user's gait information and adjust the limb swing and support state, use functional electrical stimulation to make the user's own muscle movement as the power output, and provide leg support through the exoskeleton joint lock to realize the use Stable and natural walking and standing of the patient.
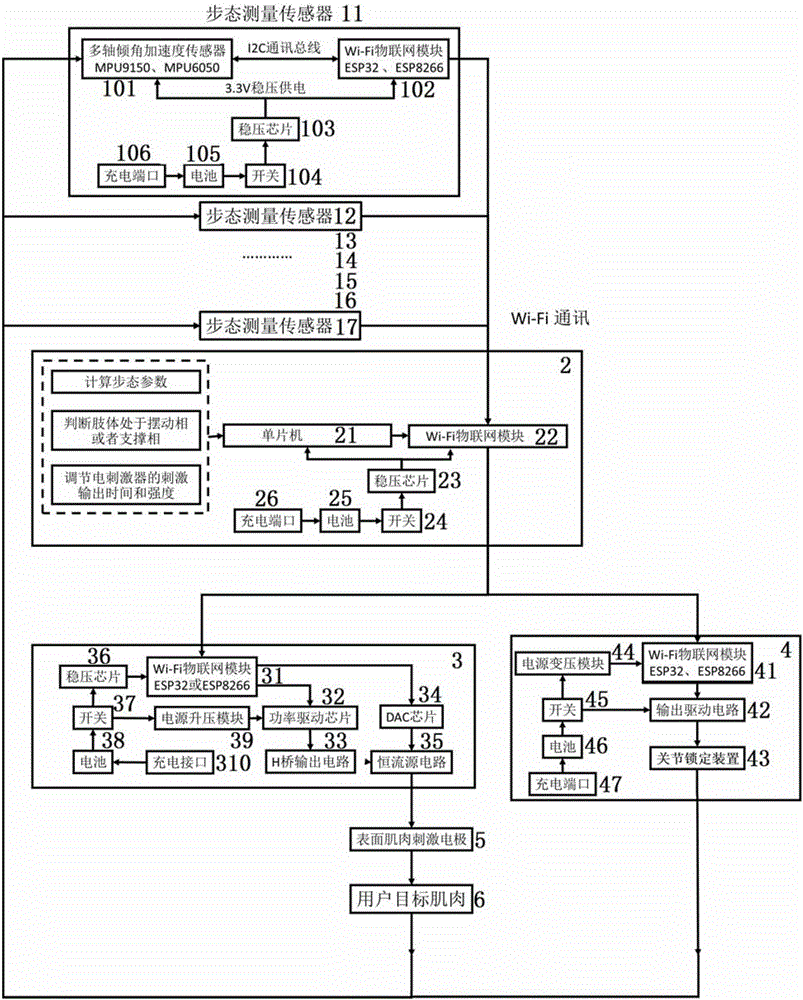
[0058] Such as figure 1 , figure 2 , image 3 As shown, an exoskeleton walking aid system driven by functional muscle electrical stimulation of the present invention includes a gait detection unit 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More