

Online adaptive calibration method for inertial sensor errors of aerospace vehicle
An inertial sensor and aerospace vehicle technology, applied in the field of inertial navigation inertial sensor error calibration, can solve problems such as installation error and scale factor error increase, inertial sensor random constant error deviating from initial calibration value, affecting navigation accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
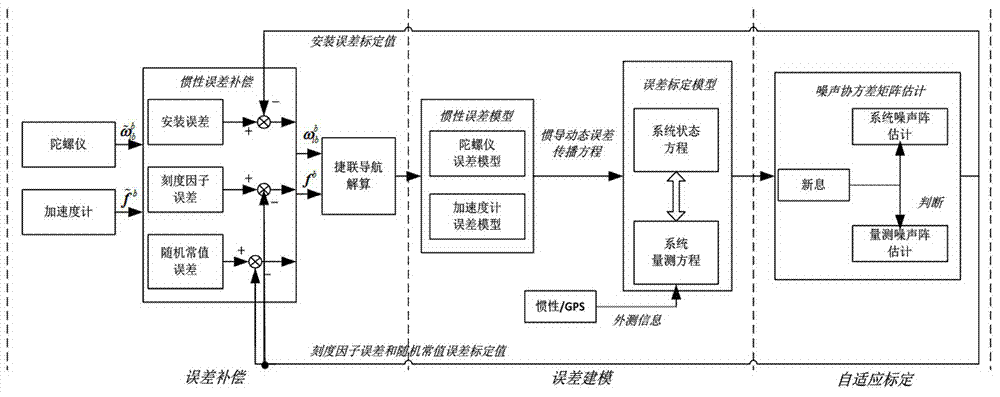
[0063] 1. Establish error model of aerospace vehicle inertial sensor
[0064] (1.1) Gyroscope error model
[0065] In the strapdown inertial navigation system, due to the high-frequency vibration of the aerospace vehicle, there will be installation errors and scale factor errors in both the gyroscope and the accelerometer. large deviation. Neglecting high-order nonlinear error terms and random errors, the error model of the gyroscope is:
[0066] δ ω ib b = [ δG + δ K g ] ω ib b + ϵ b - - - ( 1 )
[0067] In formula (1), δ ω ib b = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More