

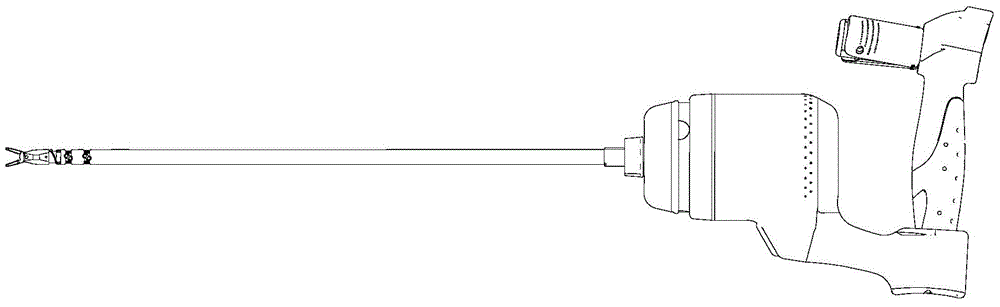
Surgery operational method by adopting intelligentized minimally invasive surgery instrument
A technology of minimally invasive surgery and surgical operation, applied in the fields of surgery, application, medical science, etc., can solve the problems of high cost of robots, high equipment costs, surgery costs, etc., and achieve the effect of low maintenance and use costs, low prices, and flexible movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0030] The controller includes a safety control module, and the working steps of the safety control module include:
[0031] During the rotation of the driving motor 101, the safety monitoring module reads the current signal output by the driving motor and compares it with the set value. When the actual current value of the motor exceeds the preset value, the safety monitoring module outputs a stop signal to control the driving motor to stop moving, so that The master-slave mapping corresponding to the handle driving device and the end motion joint part is automatically cut off, ensuring that the driving steel wire is not broken and avoiding the excessive force of the minimally invasive surgical intelligent instrument of the present invention on human tissue and damaging the tissue; as well as
[0032] When the handle and the rotation base are moving, the safety monitoring module reads the position signals of the deflection potentiometer 113 and the rotation potentiometer 119,...
Embodiment 1
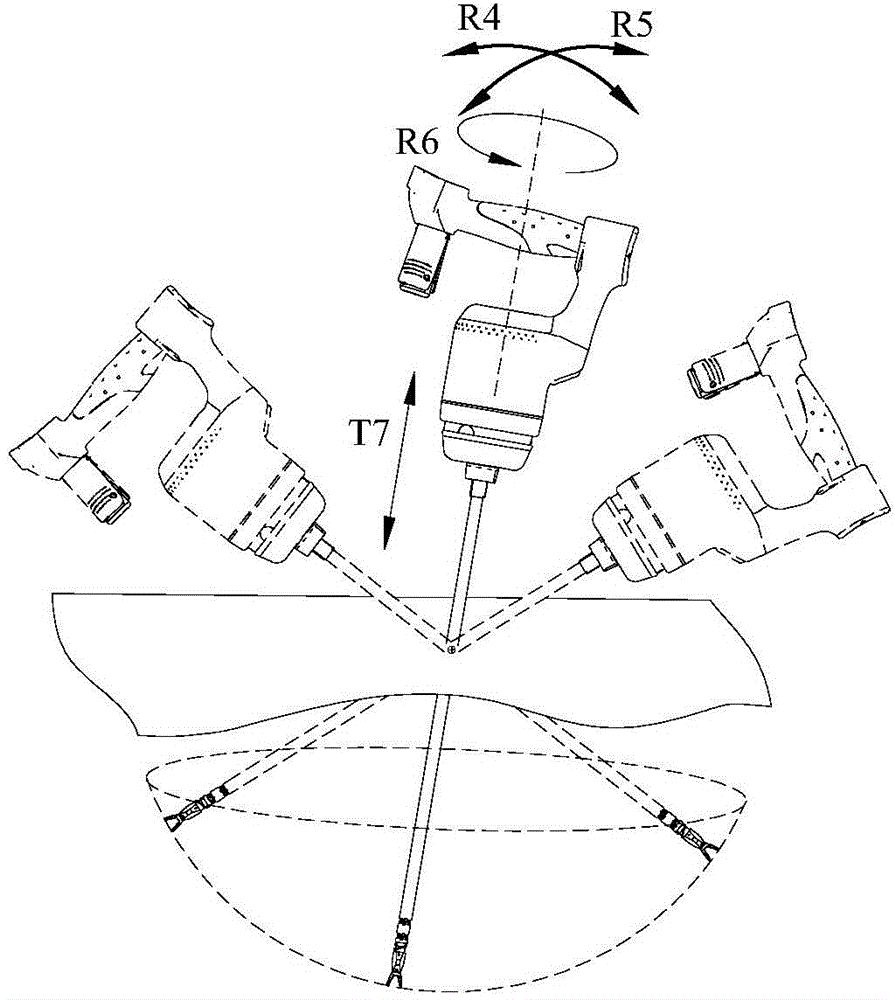
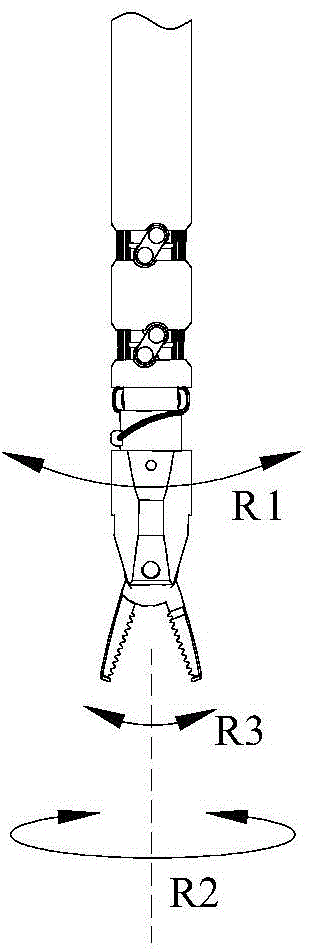
[0056] (1) Hand-held intelligent instruments for minimally invasive surgery allow the terminal motion joints of the instrument to enter the human body for surgical operations. The hand-held operation process includes operating the handle drive device of the instrument by hand, and then how free the space of the detected hand-operated handle drive device is. The high-speed motion control signal is output to the drive motor through the controller and the driver;
[0057] Specifically include the following steps:
[0058] Manually turn the handle 116 of the handle drive device, detect the rotation angle and speed of the handle 116 through the deflection potentiometer 113 installed on the rear end of the handle, and send an I / O signal to the controller, and the controller converts the I / O signal into deflection The motion control signal is sent to the driver, and the driver transmits the control signal to the first drive motor 101, and the first drive motor 101 starts; The rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More