

Negative pressure adsorption type biomimetic wall-climbing robot
A wall-climbing robot and adsorption-type technology, applied in the field of wall-climbing robots, can solve problems such as poor stability, unresolved intelligence, and inability to climb over trenches, so as to improve the load carrying capacity, enhance the intelligence level, and reduce work burden effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
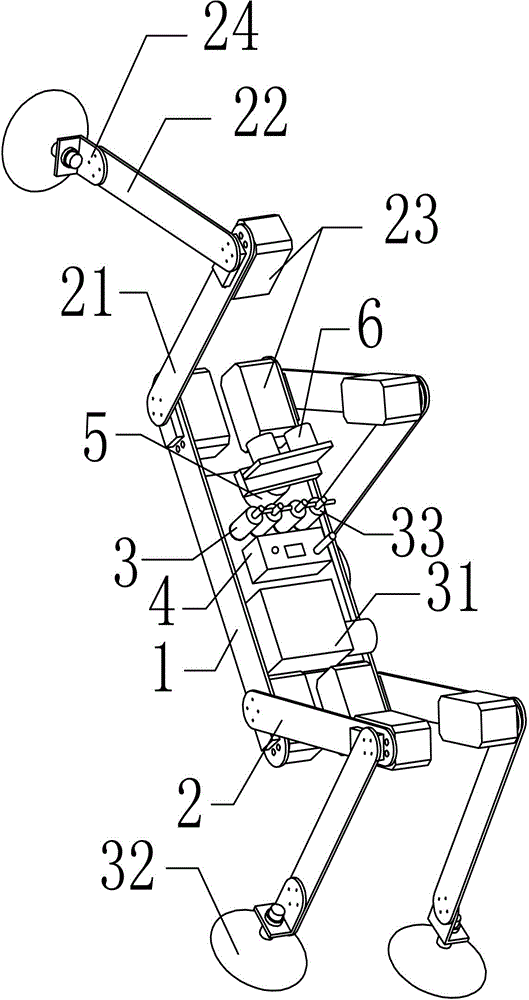
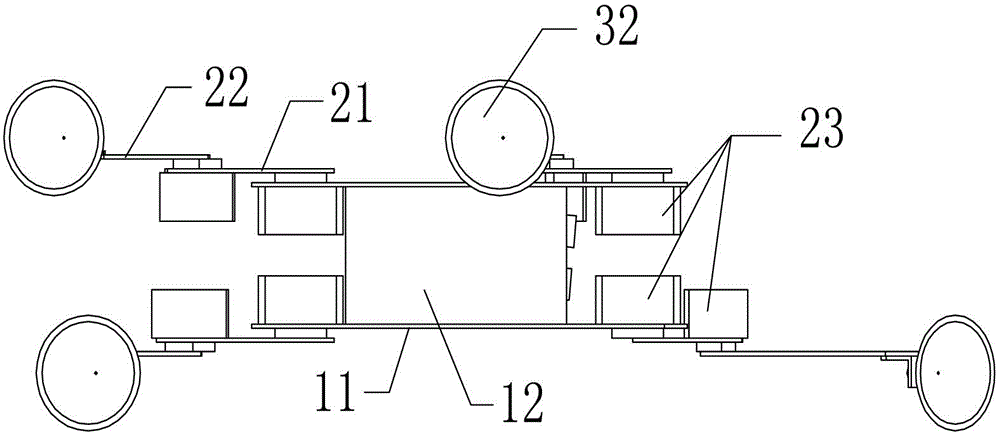
[0039] Such as figure 1 and figure 2As shown: a negative pressure adsorption bionic wall-climbing robot of this embodiment includes a skeleton 1, a walking device 2, an adsorption device 3 and a control circuit 4. The walking device 2 is installed on both sides of the skeleton 1, and the The control circuit 4 is installed in the upper middle part of the skeleton 1; wherein:
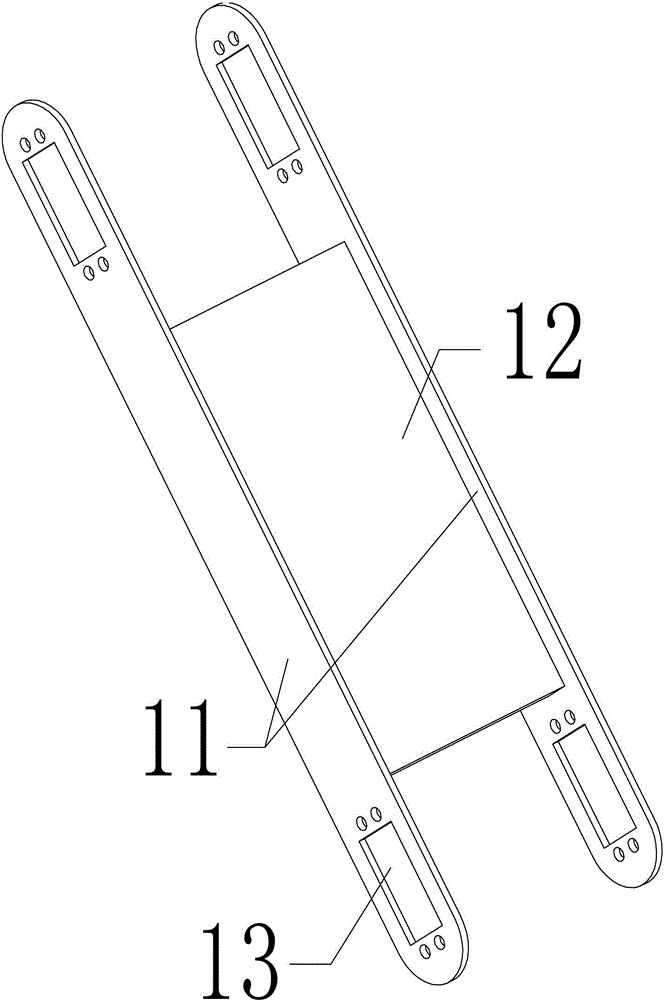
[0040] Such as image 3 As shown: the skeleton 1 includes a side plate 11 and a bottom plate (12), the number of the side plates (11) is two, and is rectangular, and a square through hole A is provided at both ends of the side plate (11) ( 13); the bottom plate (12) has a cuboid plate structure, and the two sides of the bottom plate (12) are respectively welded to the two side plates (11);
[0041] Such as figure 1 , figure 2 , Figure 4 , Figure 5 and Figure 6 Shown: the walking device (2) includes a short arm (21), a long arm (22), a steering gear (23) and a suction cup seat (24), and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More