

Wheel switching mechanism for mobile robot
A mobile robot and switching mechanism technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of slow walking speed and poor obstacle avoidance ability, and achieve the effects of reducing power consumption, saving processing and assembly costs, and reducing the number of motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
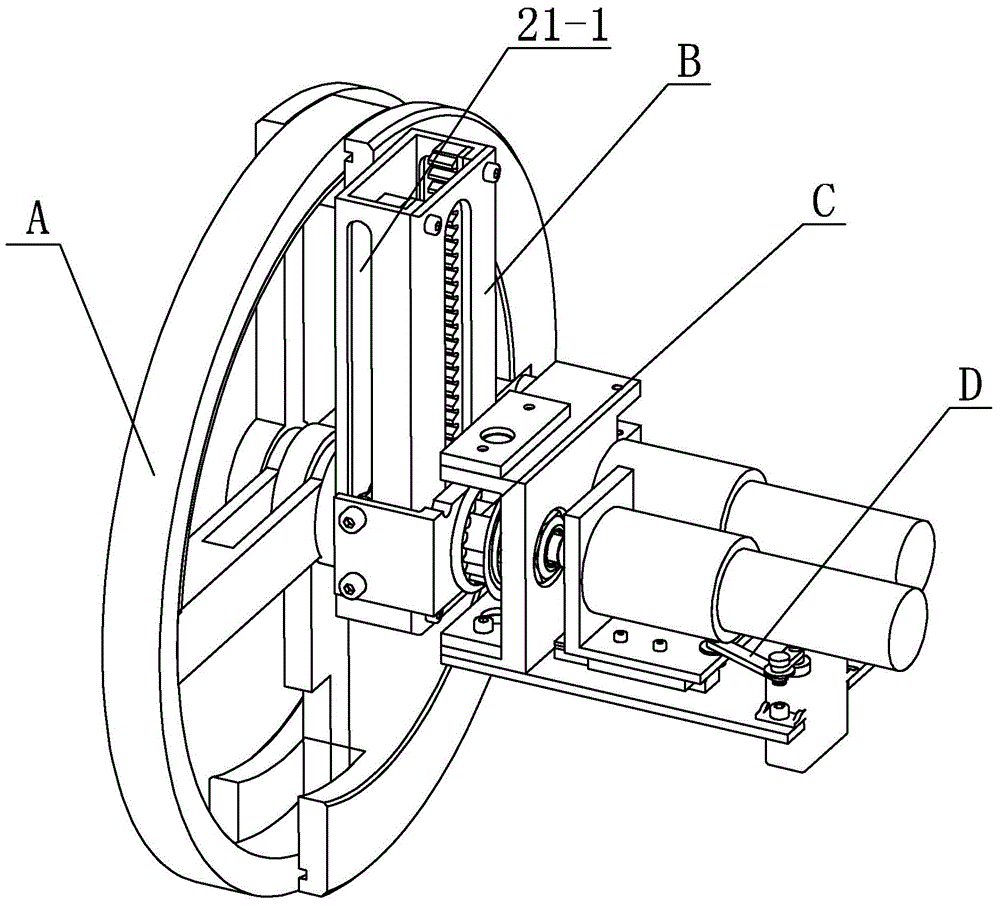
[0017] Specific implementation manner one: such as Figure 1~5 As shown, the wheel-foot conversion mechanism for a mobile robot of this embodiment includes a wheel-foot conversion body A, a lifting mechanism B, a rotating mechanism C, and a switching mechanism D;
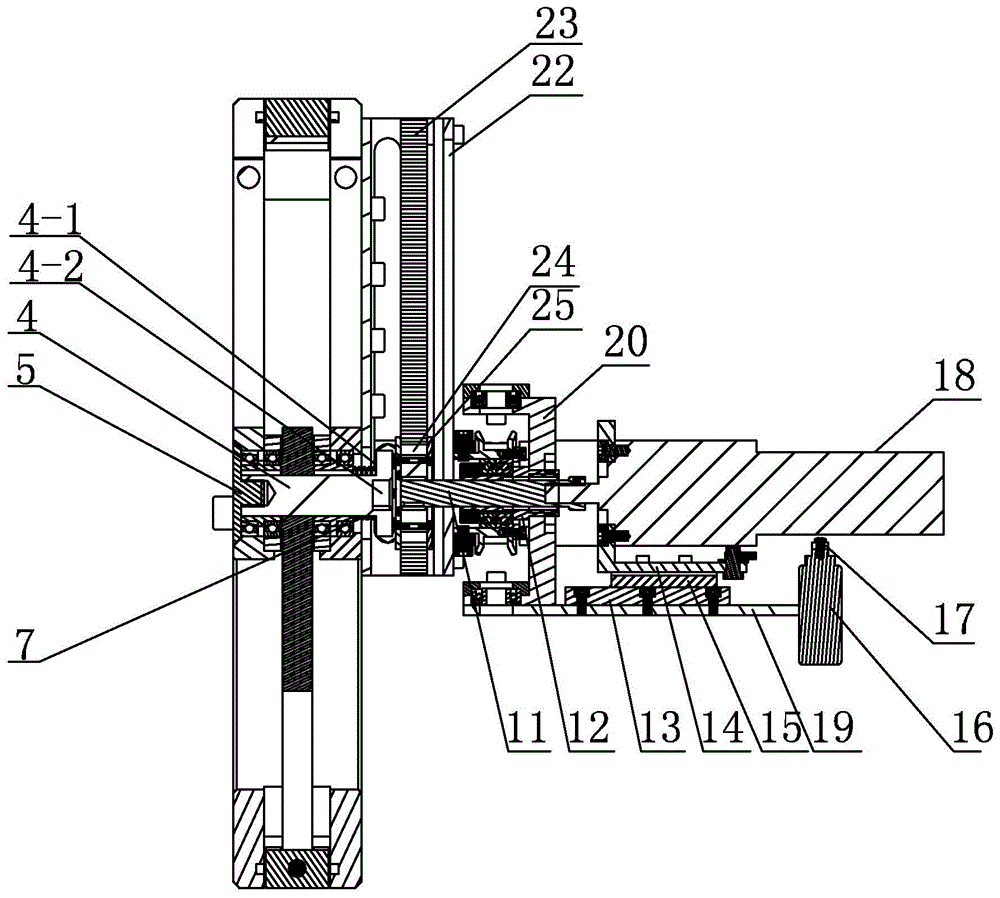
[0018] The wheel foot conversion body A includes a fixed half-wheel 1, a movable half-wheel 2, a single banner 3, a central shaft 4, a first stop block 5 and a spring 6. The central shaft 4 is installed at the center of the fixed half-wheel 1 through a first bearing , One end of the central shaft 4 is fixedly connected and axially locked by the first limit block 5, the other end of the central shaft 4 is provided with a shoulder 4-1, the spring 6 is sleeved on the central shaft 4 and is located on the first bearing Between the shoulder 4-1, the other end of the central shaft 4 is machined with a central blind hole 4-2, the central blind hole 4-2 is machined with a first keyway; the fixed half wheel 1 is machined with a...
specific Embodiment approach 2
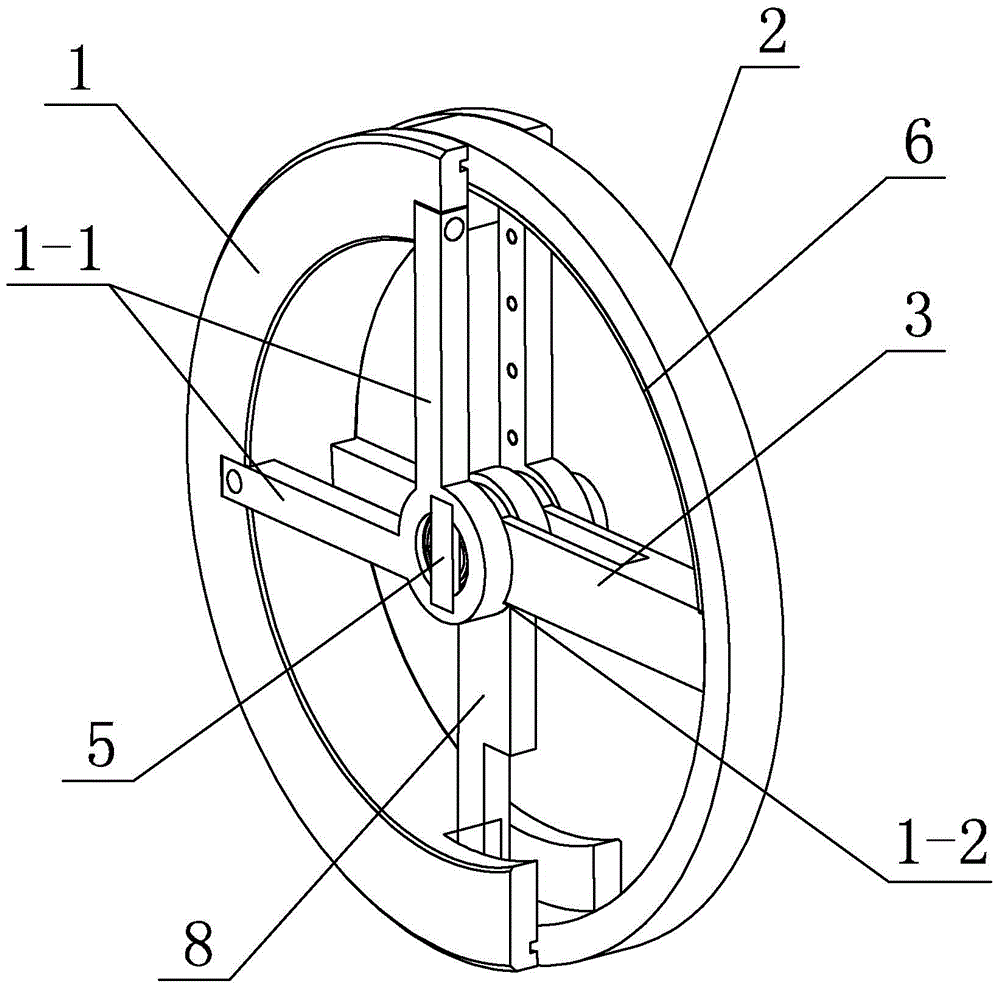
[0022] Specific implementation manner two: such as figure 2 As shown, the fixed half-wheel 1 of this embodiment is provided with two fixed banners 1-1, and the two fixed banners 1-1 are arranged at right angles. With this arrangement, the rigidity of the fixed half-wheel 1 is guaranteed, and serious deformation will not occur under radial force. The fixed banner 1-1 and the fixed half-wheel 1 are designed into two parts, which also reduces the processing time. Difficulty and cost. The other components and connection relationships are the same as in the first embodiment.
specific Embodiment approach 3
[0023] Specific implementation manner three: such as figure 2 As shown, the wheel foot conversion body A of this embodiment includes a baffle 6 and a movable banner 8. The baffle 6 is arranged on the inner wall of the movable half-wheel 2, and the connection between the two fixed banners 1-1 is processed with notches. 1-2. When changing the wheeled state, the single banner 3 is restricted by the notch 1-2 in the horizontal position, the upper end of the single banner 3 is in contact with the baffle 6, and the movable banner 8 is vertically arranged on the wheel foot conversion body A In the lower half, one end of the movable banner 8 is fixedly connected with the central shaft 4, and the other end of the movable banner 8 is fixedly connected with one end of the movable half-wheel 2. With such a design, it is easy to see that the single banner 3 is a follow-up spoke, which can rotate with the movable half wheel 2 when the wheel foot changes, which can improve the rigidity of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More