

Parallel robot electrical control system
A technology of electrical control system and robot, which is applied in the direction of electrical program control, general control system, control/adjustment system, etc., can solve the problems of poor bag placement and low production efficiency, and meet the needs of large-scale mass production and improve production Efficiency, accurate counting effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
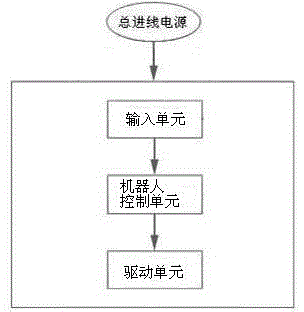
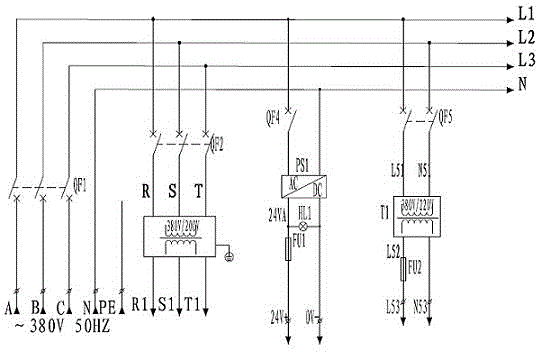
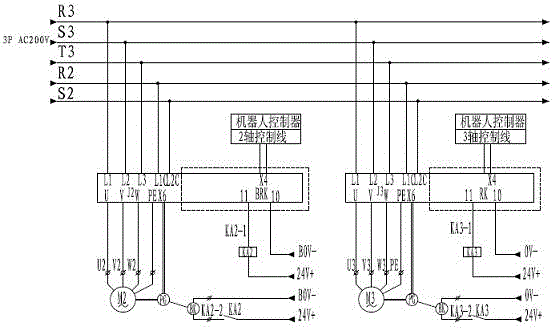
[0019] like Figure 1 to Figure 9 As shown, the parallel robot electrical control system includes a total incoming power supply, an input unit, a robot control unit, and a drive unit. Connected to the robot control unit, the robot control unit sends control signals, the robot control unit is connected to the drive unit, controls the action of the drive unit, the robot control unit receives the control signal from the input unit and automatically records, performs the next step, and controls the drive unit action after completion For the next step, the main incoming power supply is connected with 24V low-voltage power supply, three-phase 200V servo control power supply and single-phase 220V control power supply. The 24V low-voltage power supply supplies power to the low-voltage components in the circuit. The input unit includes the start button SB1 and the program stop button. SB2 and fault reset button SB3, the drive unit includes J1-axis servo motor, J2-axis servo motor, J3-a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More