

Simulation training method for special situation fault of unmanned aerial vehicle and system thereof
A fault simulation and training method technology, which is applied to simulators, simulators for space navigation conditions, instruments, etc., can solve problems such as drone crashes, slow development progress, and development lag, and achieve training time and cost savings. Integration Flexible and diverse methods, the effect of improving training efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
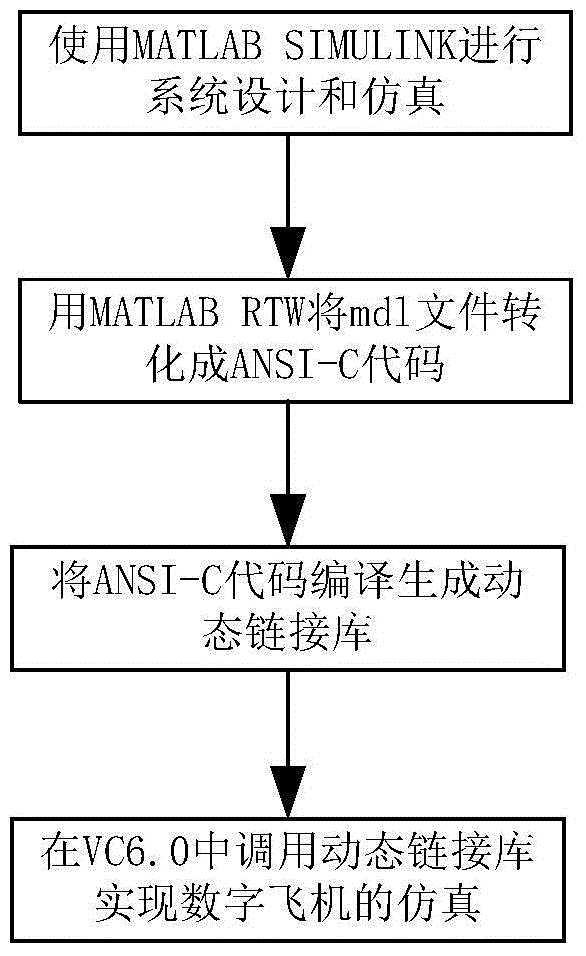
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0035] The present invention at first proposes a kind of unmanned aerial vehicle special condition failure simulation training method, comprises:
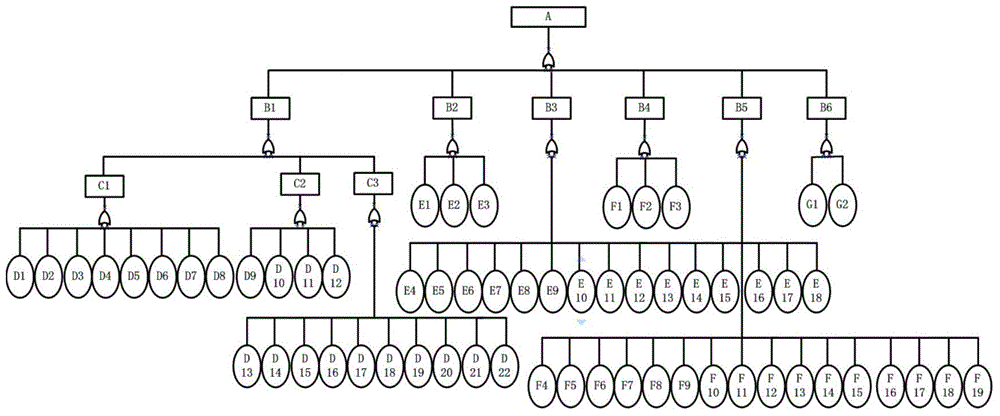
[0036] Taking the unmanned aerial vehicle's special situation failure as the top event, list all the bottom events directly or indirectly associated with the top event through the traversal method, and the traversal method is to find out all intermediate events that may directly lead to the top event, For each intermediate event, find out all secondary events that may directly lead to the intermediate event, until tracking finds all bottom events, and the bottom event is the basic cause that causes the special situation failure of the unmanned aerial vehicle;
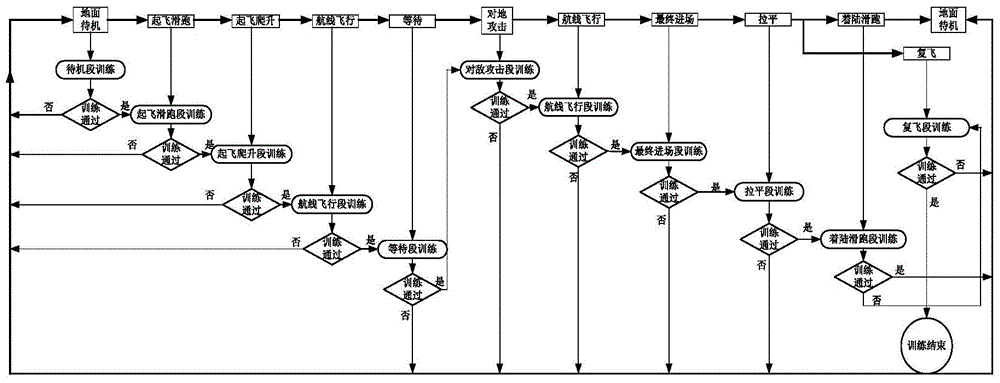
[0037] The whole process of the special condition failure simulation training of the unmanned aerial vehicle is divided into a plurality of training phases...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More